点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

来源丨hhttps://tianchi.aliyun.com/forum/postDetail?postId=195955 | 阿里云天池
一. 总体方案概述
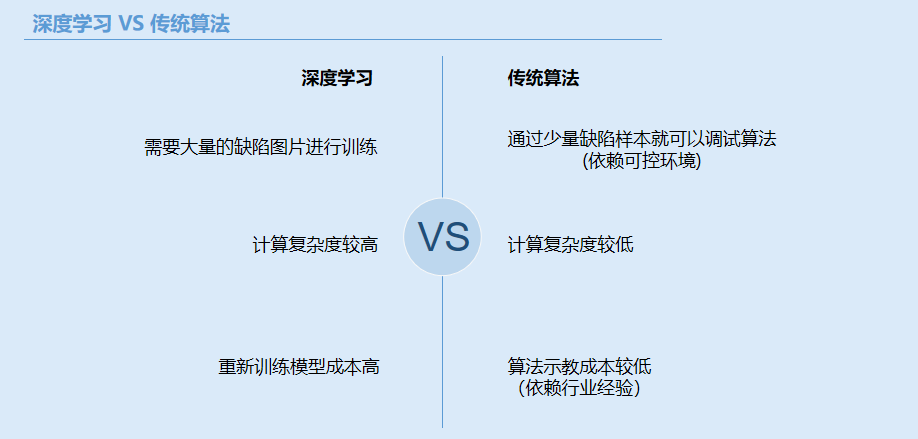
虽然当前深度学习技术十分火爆,但它占AOI落地项目中的比例仅约10%。传统算法依然无法被完全取代,它有着计算复杂度低、调试成本低等优点。
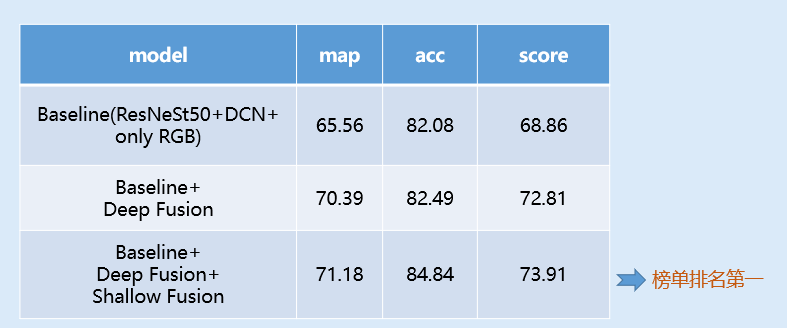
为了结合深度学习算法和传统算法的优势,我们提出Deep and Shallow Fusion Network (DSFNet), 该网络将传统算法提取的特征在模型的深层和浅层按通道进行拼接。这样的结构仅用单模型ResNeSt50就取得了优异的成绩。
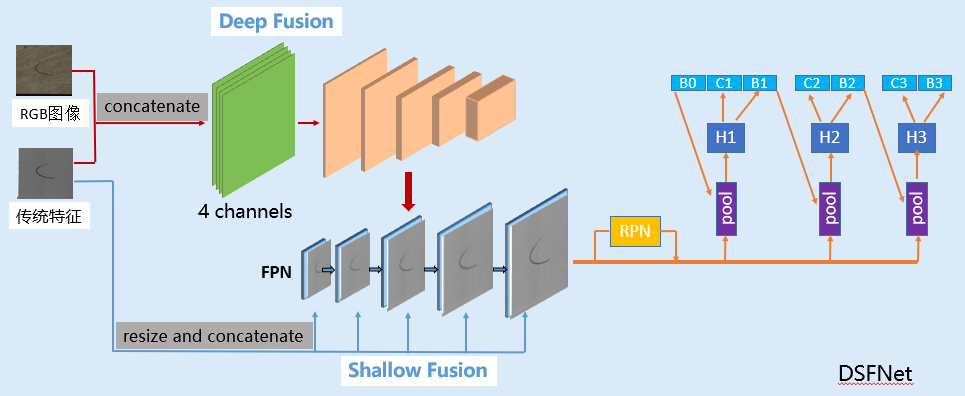
我们对仅在模型的深层或者浅层拼接分别进行了实验,发现只有同时进行拼接效果最好。
二. 传统特征提取
用surf算子提取瑕疵图和模板图的特征点,再通过透视变换将模板与瑕疵图对齐,最后差分得到传统特征,其流程框图如下:
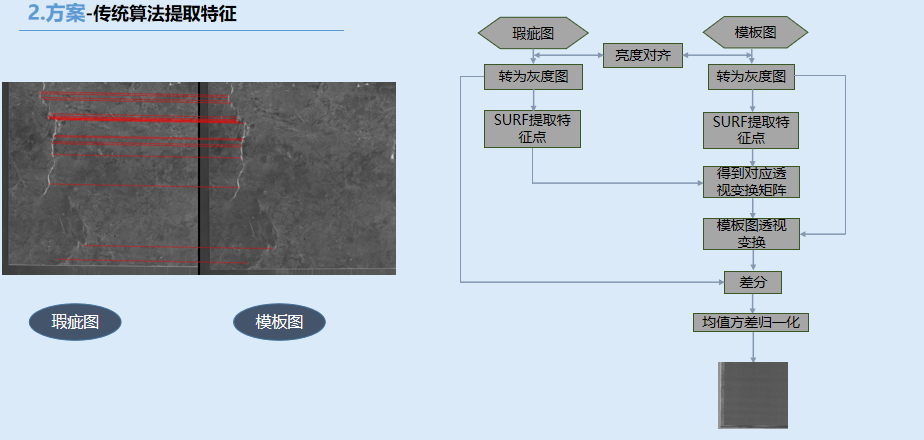
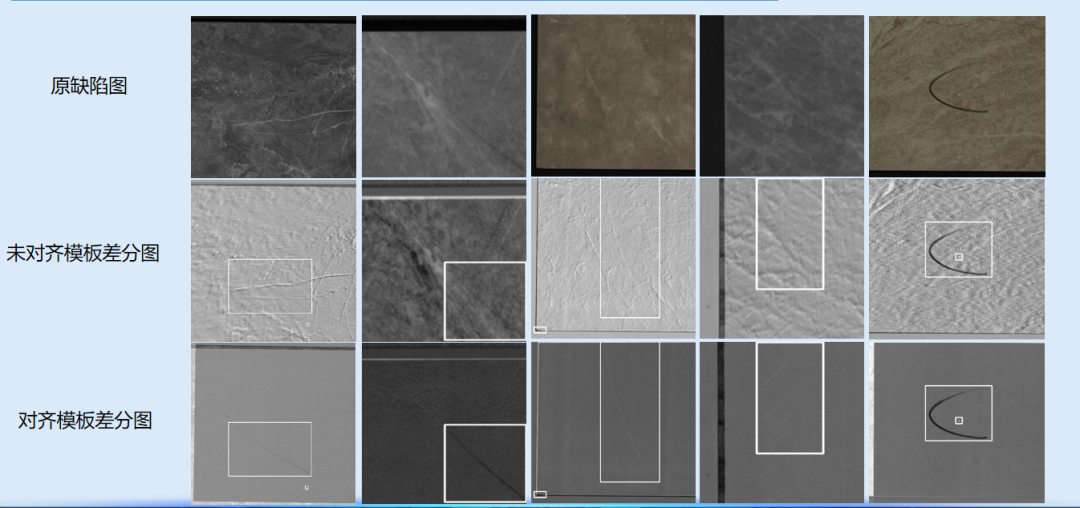
由于瓷砖的花纹复杂,与瑕疵难以区分。这样对齐差分后,可以抑制绝大部分的噪声,而突出瑕疵的特征。
三. 其他性能优化措施
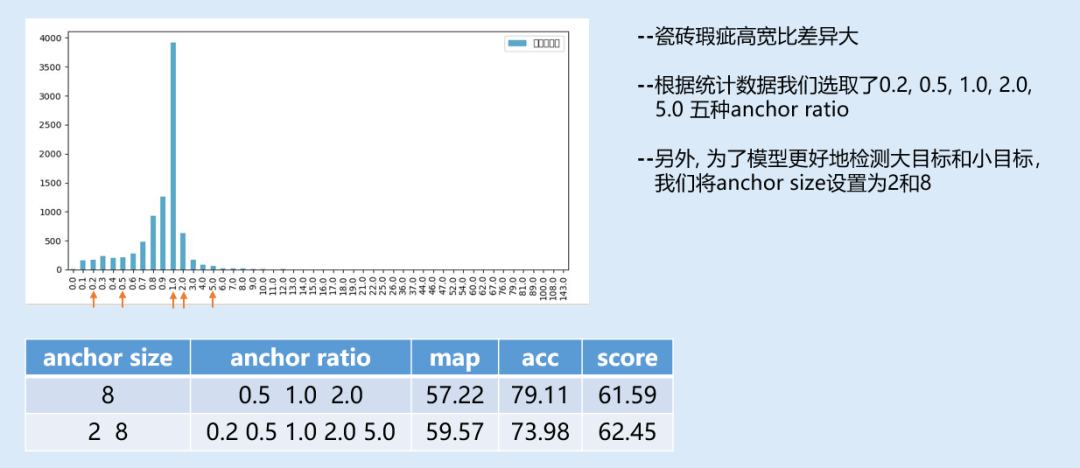
anchor_scale和anchor_size设置。对于不同的检测任务,往往需要统计训练数据来针对性的设置这两个参数,这样才能将模型的性能最大化。
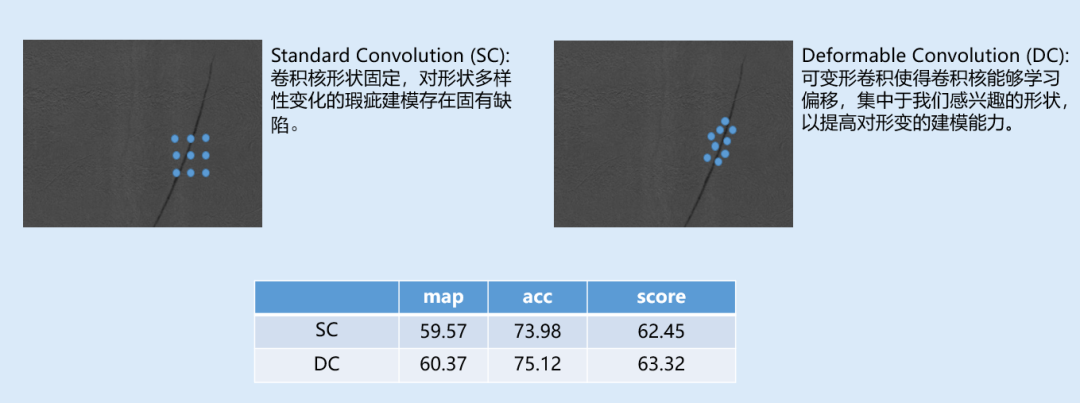
可变形卷积增加了模型对各种目标形状的建模能力,是个稳定的涨分点。
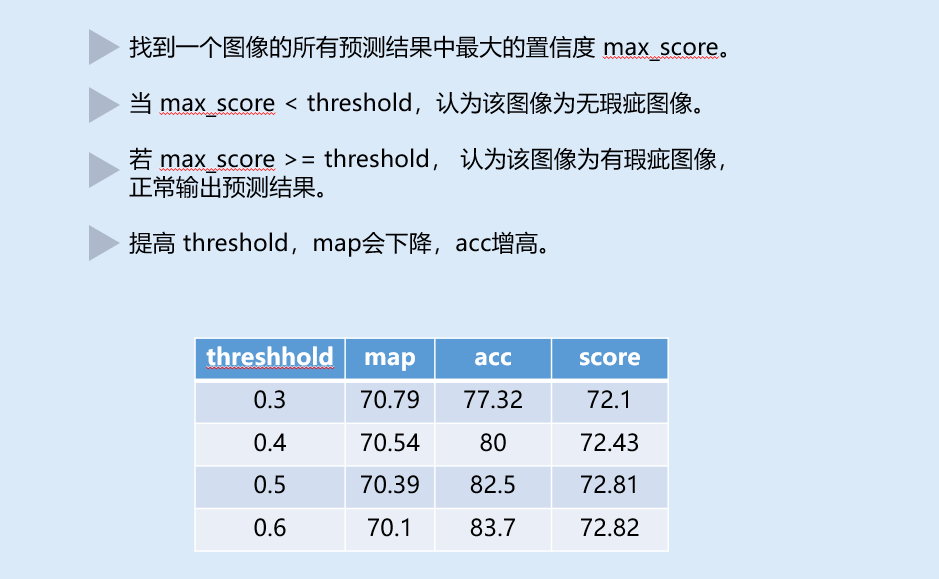
双阈值,对于提高ACC效果明显, 会略微降低mAP。需要调到合适值,才能达到总score最大化。
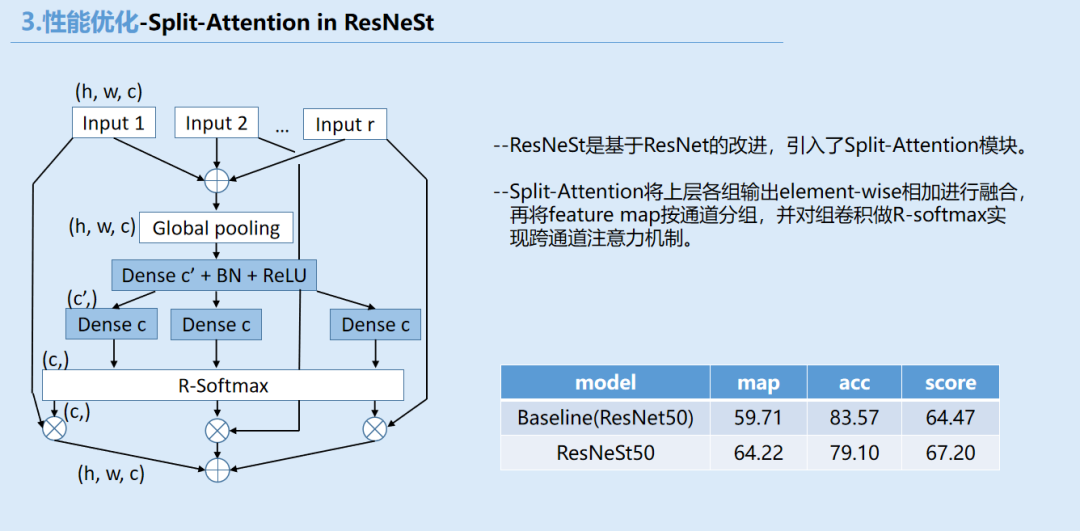
Backbone是ResNeSt50。由于split-attention模块能够实现跨通道注意力机制,所以这个模型正好适合我们按通道拼接的传统特征和深度模型特征。
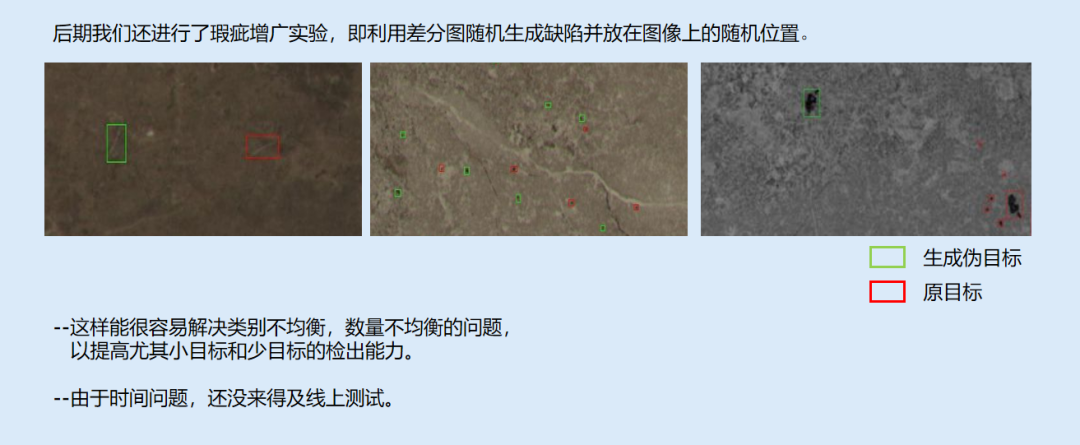
后期还利用差分图像做了瑕疵增广实验,由于时间关系,未能测试。
四. github地址
正在整理,即将开放.
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款 圈里有高质量教程资料、可答疑解惑、助你高效解决问题觉得有用,麻烦给个赞和在看~