点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转载自小白学视觉,文章仅用于学术分享。
OpenCV的“findContours”功能经常被计算机视觉工程师用来检测物体。OpenCV的存在,使得我们只需要编写几行代码就可以检测轮廓(对象)。然而,OpenCV检测到的轮廓通常是分散的。例如,一个功能丰富的图像可能有数百到数千个轮廓,但这并不意味着图像中有那么多对象。一些属于同一对象的轮廓是单独检测的,因此我们感兴趣的是对它们进行分组,使一个轮廓对应一个对象。
当我在项目中遇到这个问题时,我花了很多时间尝试使用不同的参数或不同的OpenCV函数来检测轮廓,但没有一个有效。然后,我做了更多的研究,在OpenCV的论坛上找到了一篇帖子,它提到了凝聚聚类。但是,没有给出源代码。我还发现sklearn支持聚合聚类,但我没有使用它,原因有两个:
- 这个功能对我来说似乎很复杂。我不知道如何输入正确的参数,我怀疑轮廓检测的数据类型是否适合该函数。
- 我需要使用python 2.7、OpenCV 3.3.1和Numpy 1.11.3。它们与sklearn的版本(0.20+)不兼容,后者支持聚类。
为了分享我编写的函数,我在Github中对其进行了开源,并将其作为要点发布在下面。以下版本适用于Python3,若需要要在Python2.7中使用它,只需将“range”更改为“xrange”。
import osimport cv2import numpy
def calculate_contour_distance(contour1, contour2): x1, y1, w1, h1 = cv2.boundingRect(contour1) c_x1 = x1 + w1/2 c_y1 = y1 + h1/2
x2, y2, w2, h2 = cv2.boundingRect(contour2) c_x2 = x2 + w2/2 c_y2 = y2 + h2/2
return max(abs(c_x1 - c_x2) - (w1 + w2)/2, abs(c_y1 - c_y2) - (h1 + h2)/2)
def merge_contours(contour1, contour2): return numpy.concatenate((contour1, contour2), axis=0)
def agglomerative_cluster(contours, threshold_distance=40.0): current_contours = contours while len(current_contours) > 1: min_distance = None min_coordinate = None
for x in range(len(current_contours)-1): for y in range(x+1, len(current_contours)): distance = calculate_contour_distance(current_contours[x], current_contours[y]) if min_distance is None: min_distance = distance min_coordinate = (x, y) elif distance < min_distance: min_distance = distance min_coordinate = (x, y)
if min_distance < threshold_distance: index1, index2 = min_coordinate current_contours[index1] = merge_contours(current_contours[index1], current_contours[index2]) del current_contours[index2] else: break
return current_contours
注意:
“calculate_contour_distance”函数获取轮廓的边界框,并计算两个矩形之间的距离。
“merge_contours”函数,我们只需使用'numpy.concatenate'即可,因为每个轮廓只是一个点的numpy数组。
使用聚类算法,我们不需要事先知道有多少个聚类。相反,可以向函数提供阈值距离,例如40个像素,因此如果所有轮廓中最近的距离大于阈值,则函数将停止处理。
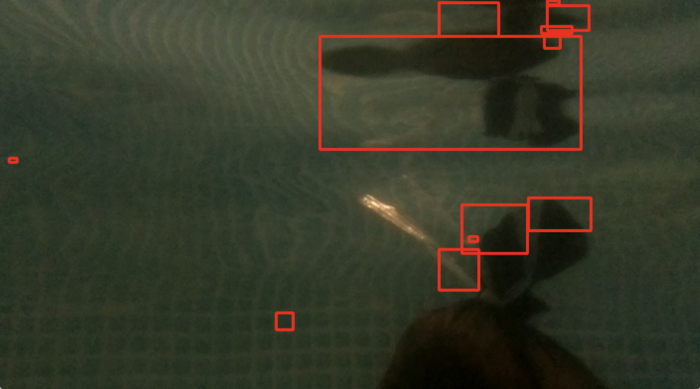
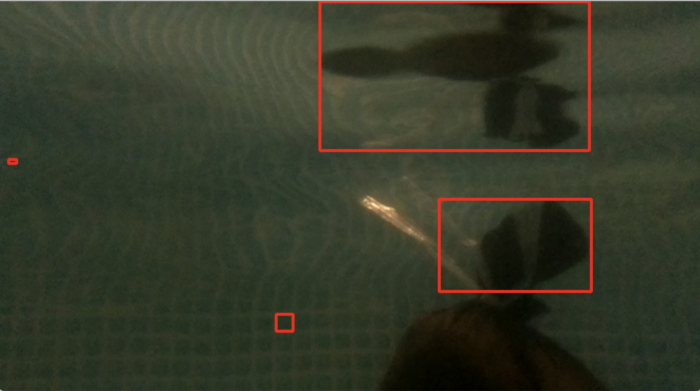
要可视化集群效果,请参见下面的两幅图像。第一幅图像显示最初检测到12个轮廓,聚类后只剩下4个轮廓,如第二幅图像所示。这两个小对象是由于噪声造成的,它们没有合并,因为与阈值距离相比,它们离太远。
GITHUB代码链接:
独家重磅课程!
1、详解Cartographer:谷歌开源的激光SLAM算法Cartographer为什么这么牛X?
2、深度学习三维重建 详解深度学习三维重建网络:MVSNet、PatchMatchNet、JDACS-MS
3、三维视觉基础 详解视觉深度估计算法(单/双目/RGB-D+特征匹配+极线矫正+代码实战)
4、视觉SLAM必备基础 详解视觉SLAM核心:地图初始化、实时跟踪、局部建图、回环检测、BA优化,工程技巧
5、 VINS:Mono+Fusion SLAM面试官:看你简历上写精通VINS,麻烦现场手推一下预积分!
6、VIO进阶:ORB-SLAM3(单/双目/RGBD+鱼眼+IMU紧耦合+多地图+闭环)独家70+讲全部上线!
7、图像三维重建课程:视觉几何三维重建教程(第2期):稠密重建,曲面重建,点云融合,纹理贴图
8、重磅来袭!基于LiDAR的多传感器融合SLAM 系列教程:LOAM、LeGO-LOAM、LIO-SAM
9、系统全面的相机标定课程:单目/鱼眼/双目/阵列 相机标定:原理与实战

全国最棒的SLAM、三维视觉学习社区↓

技术交流微信群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群,请添加微信号 chichui502 或扫描下方加群,备注:”名字/昵称+学校/公司+研究方向“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓

— 版权声明 —
本公众号原创内容版权属计算机视觉life所有;从公开渠道收集、整理及授权转载的非原创文字、图片和音视频资料,版权属原作者。如果侵权,请联系我们,会及时删除。








