点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文名:
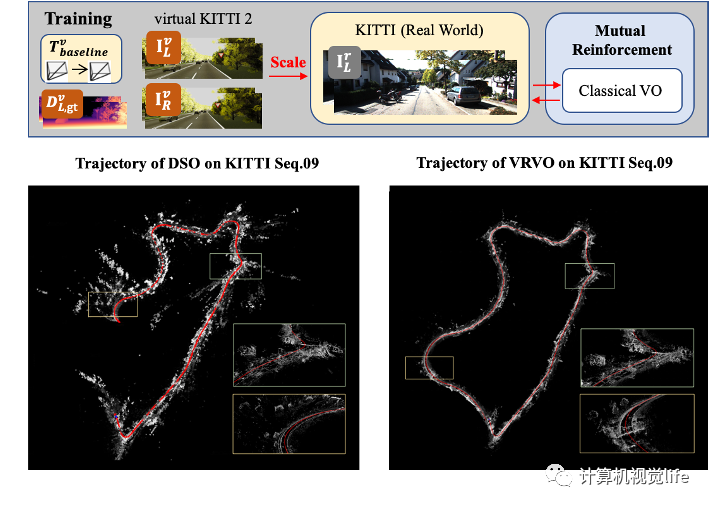
Towards Scale Consistent Monocular Visual Odometry by Learning from the Virtual World
论文地址:https://arxiv.org/pdf/2203.05712.pdf
作者单位:悉尼大学
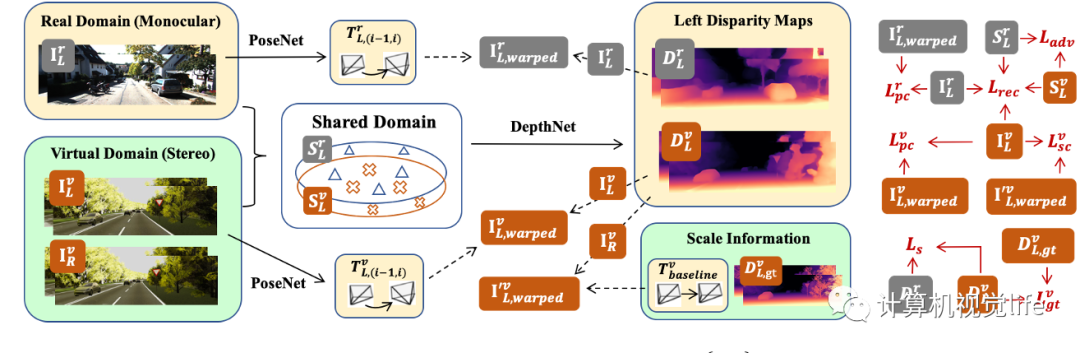
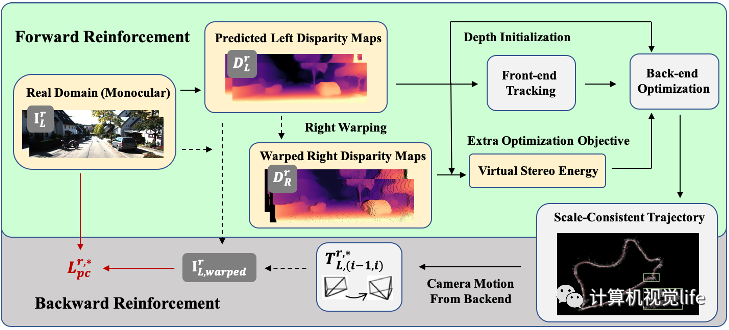
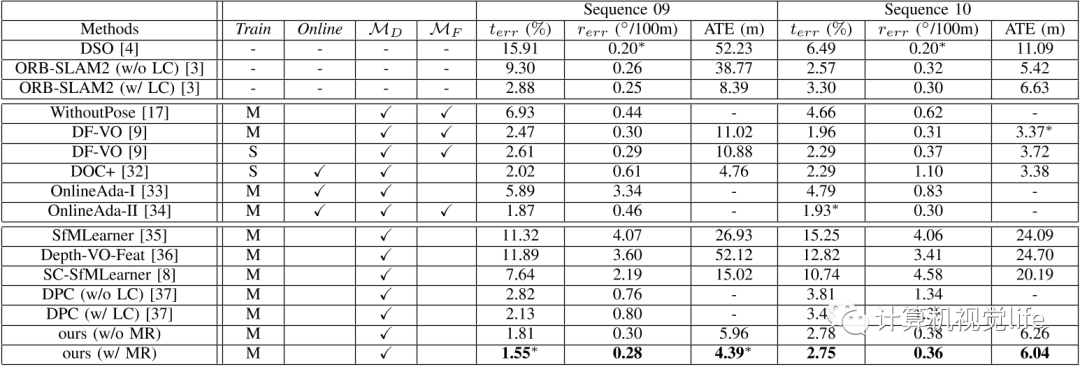
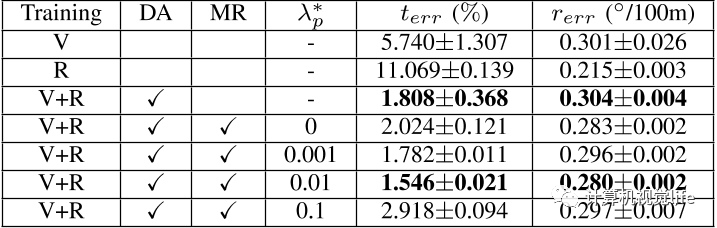
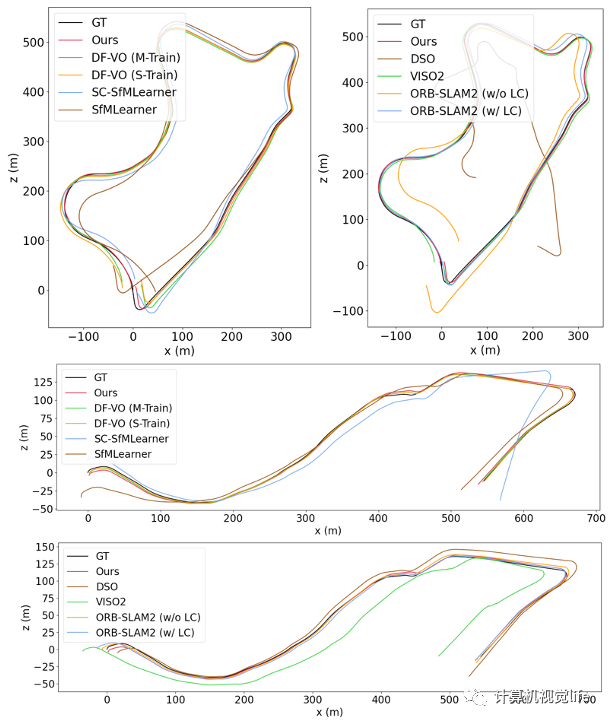
单目视觉里程计(VO)通过从高性价比的相机图像中提供实时的车辆运动,引起了广泛的研究关注。然而,目前最先进的基于优化的单目VO方法在长期预测时存在尺度不一致的问题。最近,深度学习被引入来解决这个问题,通过在训练数据集中利用双目序列或运动真值。然而,这需要额外的数据成本,而且这样的训练数据可能不是在所有数据集中都可用。在本文中,我们提出了一种新的VRVO框架,该框架可以从现代仿真环境中容易获得的虚拟数据中检索绝对尺度,而在真实领域中,无论是训练阶段还是推理阶段都不需要双目数据或地面运动真值。具体地说,我们首先使用单目真实图像和双目虚拟数据训练一个尺度感知的视差网络。利用对抗训练策略将两个领域的图像映射到一个共享的特征空间,弥合了虚拟和现实领域的差距。然后,通过构建一个虚拟目标来确保长轨迹上的尺度一致性,从而将得到的尺度一致性差异与直接VO系统集成。此外,为了解决优化后端和学习过程分离导致的次优问题,我们进一步提出了一个相互强化的管道,允许学习和优化之间的双向信息流,提高了彼此的鲁棒性和准确性。我们在KITTI数据集上验证了我们的框架的有效性。
以上内容来自从零开始机器人SLAM知识星球 每日更新内容
我们建立了全国最大的机器人SLAM开发者交流社区,包括
小白入门图文/视频教程、学习过程疑难点解答、每日最新论文/开源代码/数据集分享、在线学习小组、笔试面试题、实习/校招/社招岗位推荐、星主直播交流等。
2018年创立、4200+会员、7500+主题分享、9900+问答评论、170+教学视频
领域:机器人SLAM、三维视觉、自动驾驶、增强现实、无人机、图像处理
直播:每月6/16/26日固定直播,涵盖大佬分享、学习经验、求职面试、实习历程、行业内幕
教程:图文视频教程:涉及代码调试、OpenCV、PCL、G2O、Ceres、视觉SLAM十四讲、LVISAM、R3LIVE……
答疑:每日星主答疑、嘉宾答疑、星友互助答疑,搜索关键字几乎所有问题都能找到答案
资讯:每日论文分享、行业资讯汇总、每周汇总、精华汇总
活动:学习小组、行业资源对接、会员激励、有偿招募助教/兼职
求职:经验分享、内推职位、SLAM面试题、笔试练习
……

长按二维码,加入即可开始学习~3天内无条件退款
购买后务必加客服领取其他权益和加交流群
现在加入免费送2020年机器人SLAM答疑汇总手册(126页,电子版见下)
学机器人SLAM/3D视觉,就上cvlife.net !
全国最大的机器人SLAM开发者社区
技术交流群
— 版权声明 —
本公众号原创内容版权属计算机视觉life所有;从公开渠道收集、整理及授权转载的非原创文字、图片和音视频资料,版权属原作者。如果侵权,请联系我们,会及时删除。









