点击下方卡片,关注“新机器视觉”公众号
https://blog.csdn.net/qingxiao__123456789/article/details/123020731
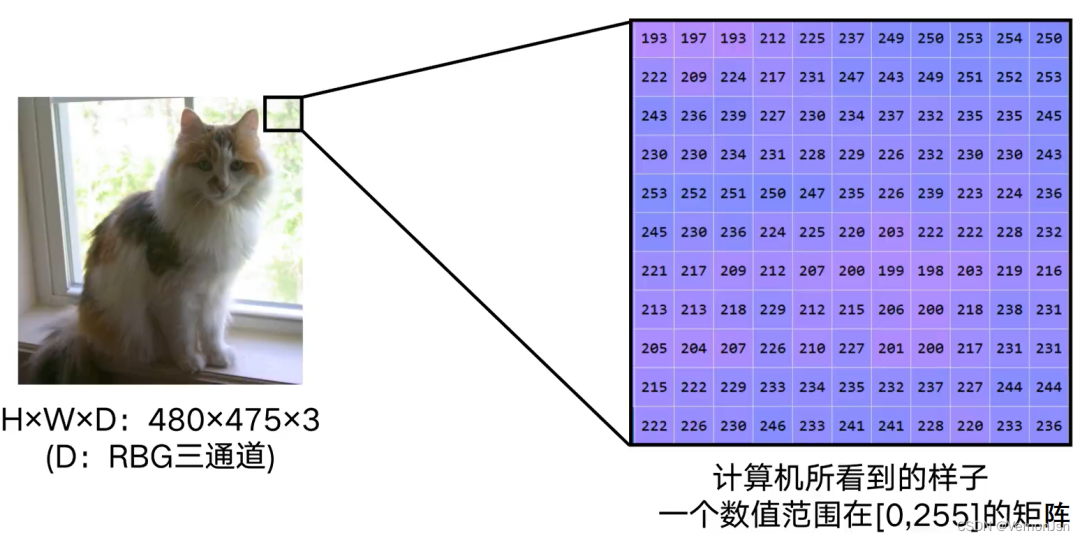
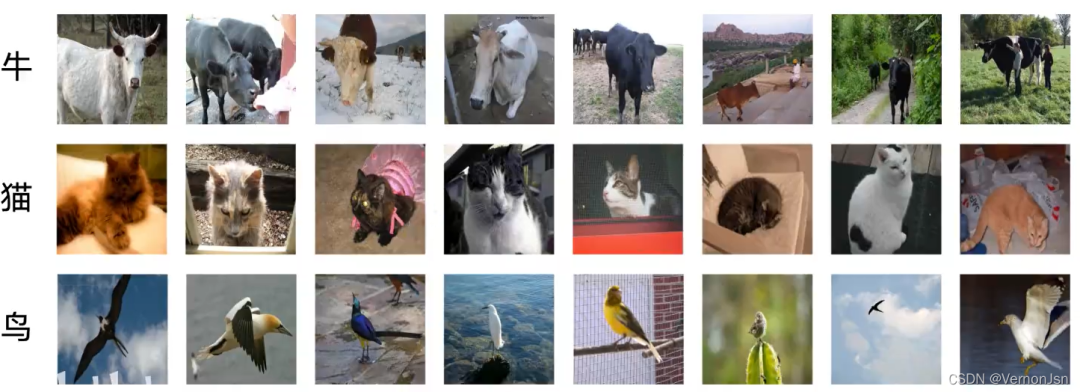
1 图像分类的概念
1.1 什么是图像分类?

图像分类,根据图像信息中所反映出来的不同特征,把不同类别的目标区分开来的图像处理方法
1.2 图像分类的难度
●任何拍摄情况的改变都将提升分类的难度

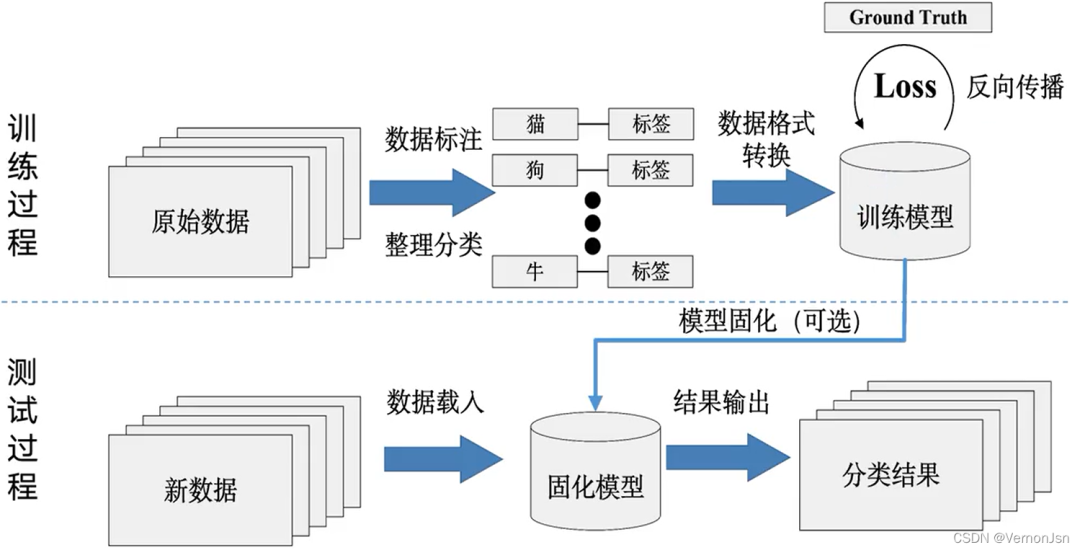
1.3 CNN如何进行图像分类
●数据驱动型方法通用流程
1.收集图像以及对应的标签,形成数据集
2.使用机器学习训练一个分类器
3.在新的图像.上测试这个分类器

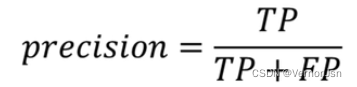
1.4 图像分类指标

精确率:查得准不准?
召回率:查得全不全?
True positives (TP):飞机的图片被正确的识别成了飞机。
True negatives (TN): 大雁的图片没有被识别出来,系统正确地认为它们是大雁。
False positives (FP):大雁的图片被错误地识别成了飞机。
False negatives (FN):飞机的图片没有被识别出来,系统错误地认为它们是大雁。

True negatives (TN): 4,四个大雁 False negatives (FN): 2,二个飞机

True positives (TP): 3,绿框. False positives (FP): 1,红框,

平均精确度( Average Precision,AP) :PR曲线下的面积,这里的average,等于是对precision进行取平均。
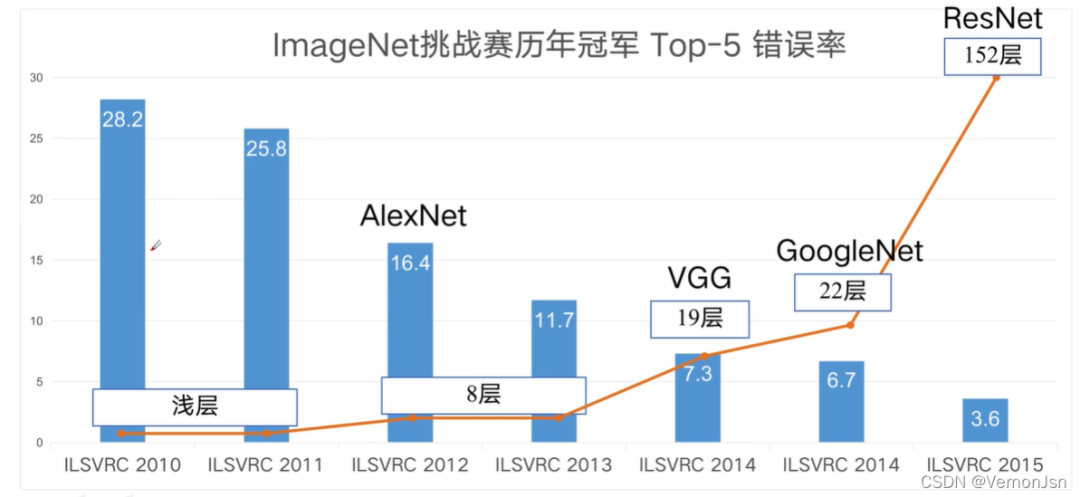
1.5 经典CNN网络性能演化
2 GoogleNet
2.1 深度网络有什么好处?
1.丰富了低、中、高等级的特征
边缘、纹理、形状、颜色.....高纬度的人类无法理解的特征
2.越深、越宽的网络具有越强的表达能力
有学者证明,一个宽度为K、深度为H的网络,能够产生至少条线段
线段越多,拟合得越准确
因此,网络加宽、加深可以提升性能,并且加深效果比加宽好:

2.2 如何设计一个卷积层?
●选择什么样的层(Layer ) ?
3x3卷积核
5X5卷积核
池化层( Pooling Layer )
2.2.1 感受层
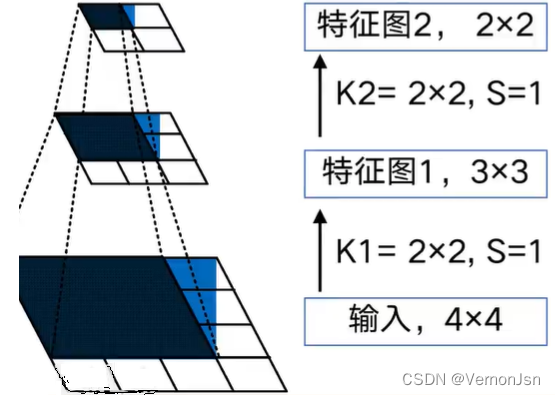
在卷积神经网络中,感受野( Receptive Field )的定义是卷积神经网络每层输出的特征图.上的像素点在输入图片.上映射的区域大小。换句话说,感受野是特征图上的一个点对应输入图上的区域。
假设两个卷积层的卷积核尺寸都为2x2,步长都为1,输入为4x4
经过两次卷积后,特征图的尺寸分别为3x3和2x2
对于特征图2的左上角像素点,它在特征图1上的感受范围为左上方的2x2区域,而此区域在输入。上的感受范围是左,上方的3x3区域,因此,感受野尺寸为3x3。
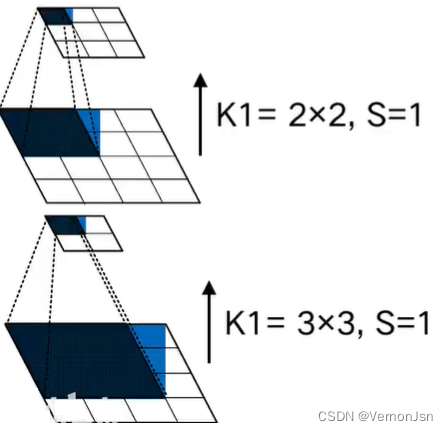
越深层的特征图, 感受野越大
对同层而言,卷积核尺寸越大,感受野越大
大的感受野对大的物体更敏感,反之,小的感受野对小的物体更敏感
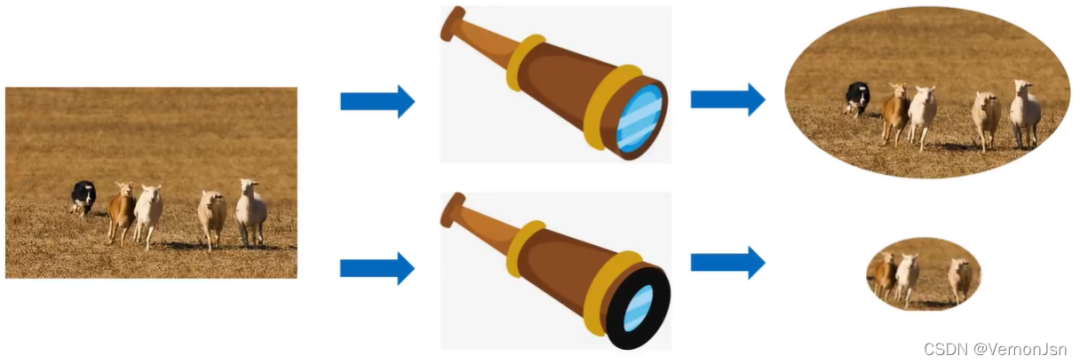
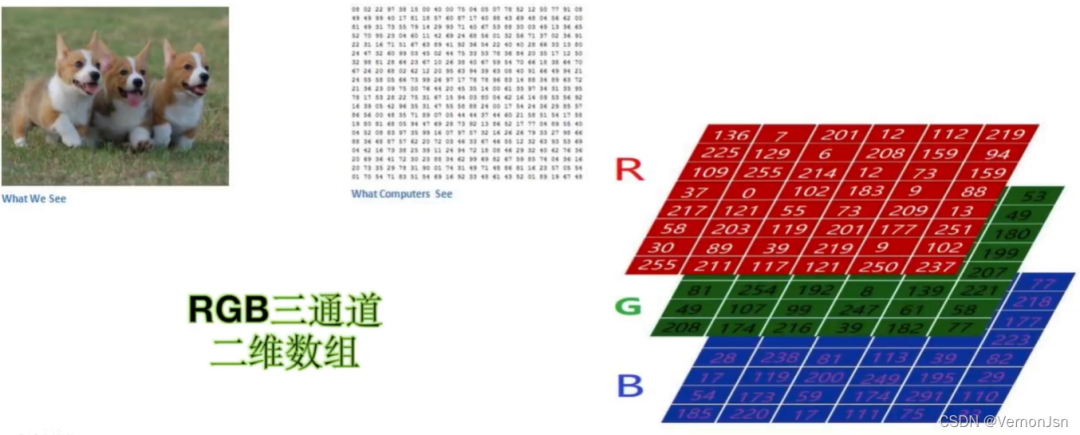
猫可以在图片里有大有小,可以在图片的局部,也可以整张图片都是;对一张图片而言,至少有RGB三个通道,如果这几多个卷积核则会导致计算量过大。
2.2.2 如何降低计算量——1x1卷积核
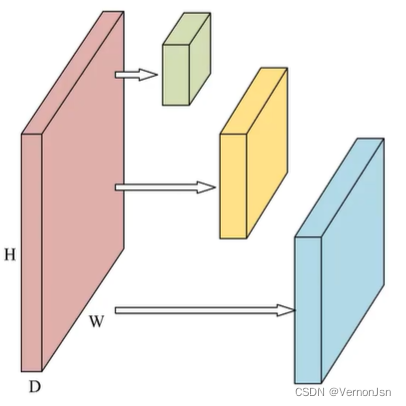
1 x 1卷积做了什么?
它在深度( Depth). 上进行了融合深度为D的输入经过一-个1 x 1卷积核,得到深度为1的输出(S=1, P=0);同理,尺寸为DxHxW的输入,经过D/2个1 X 1卷积核,将会得到D/2xHxW的输出(S=1,P=0);最终,在不损失太多信息的情况下,对输入进行了降维。
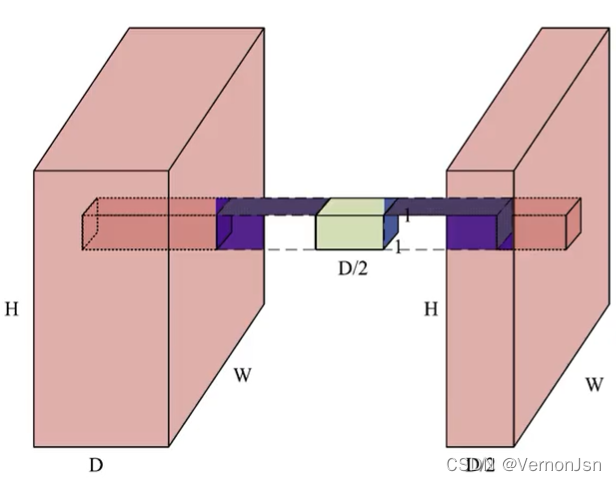
小结:1X1的卷积是--个非常优秀的结构它可以跨通道组织信息提高网络的表达能力,同时可以对输出通道升维和降维。[想象一下:两片面包压缩成一-片的宽度又或者加点膨化剂,膨胀成4片的宽度]
2.3 Inception模块
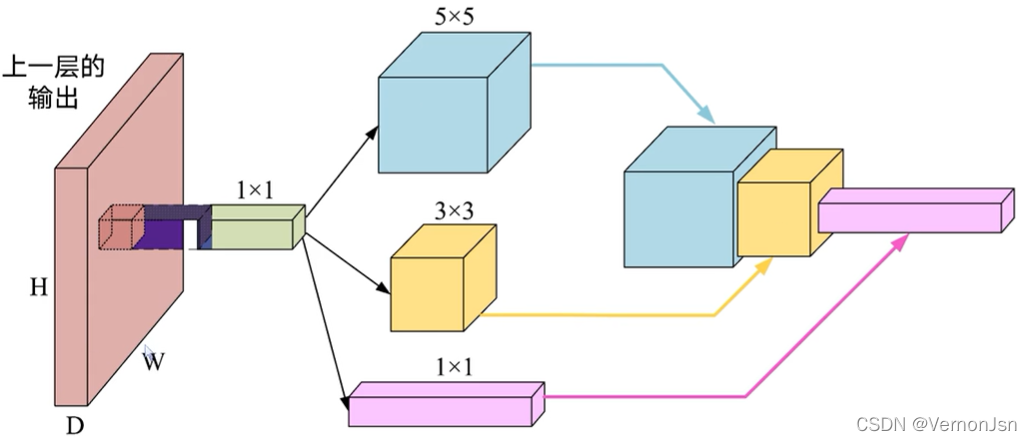
在1x1卷积后,添加不同的卷积分支
实现同一卷积层的多尺度特征提取与融合
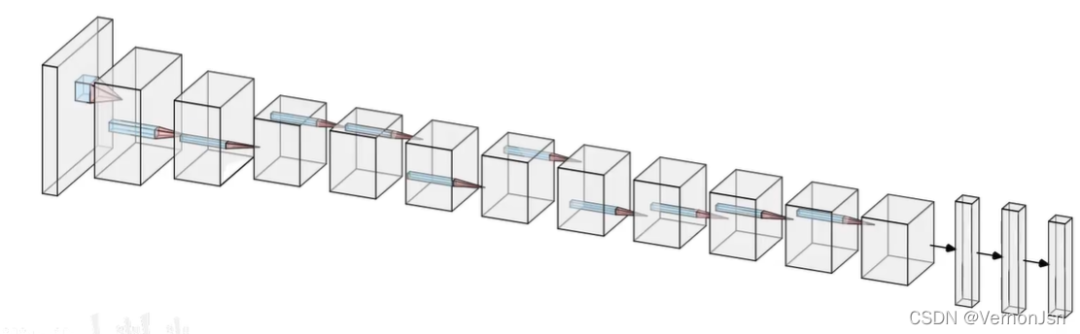
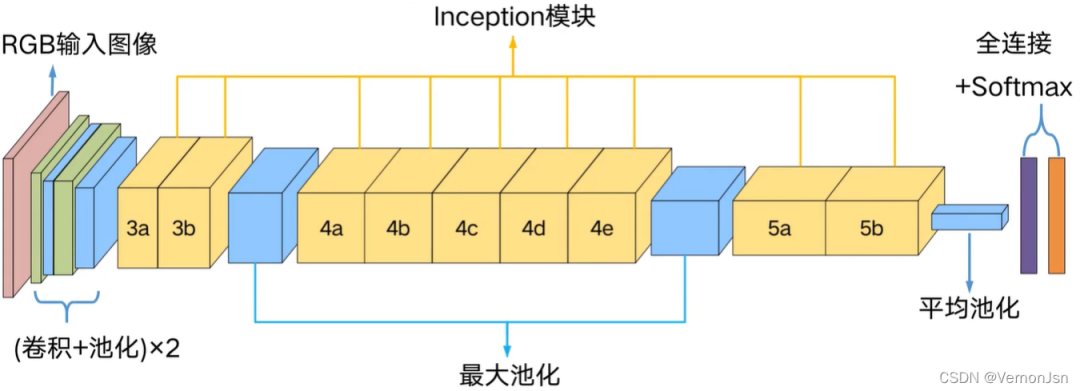
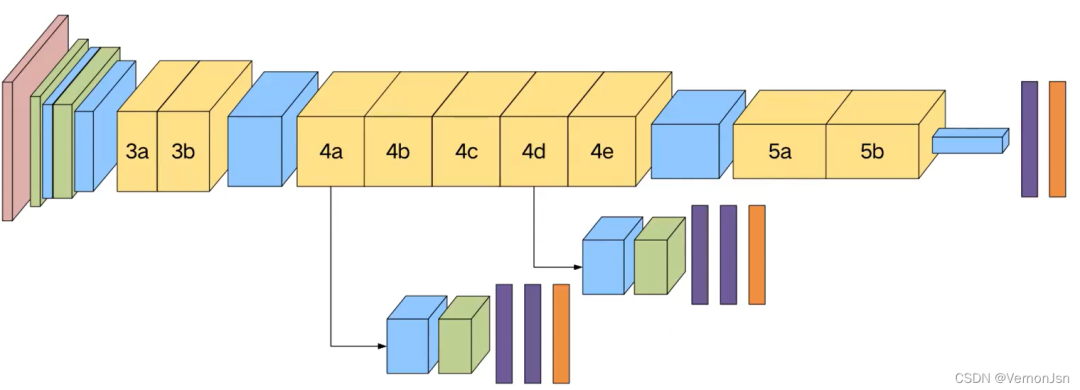
2.4 整体网络结构
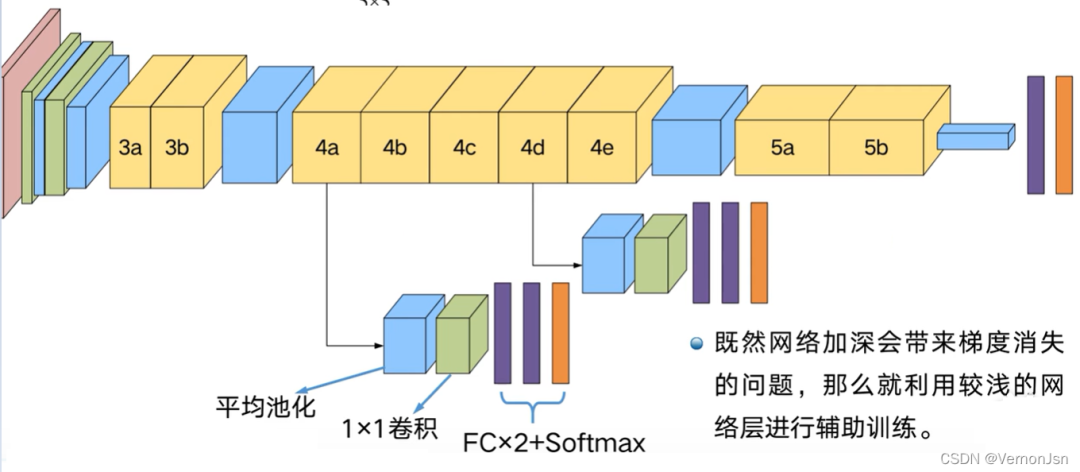
一个潜在的问题
➢在较深的网络中进行反向传播可能会出现“梯度消失”,导致训练无法继续进行
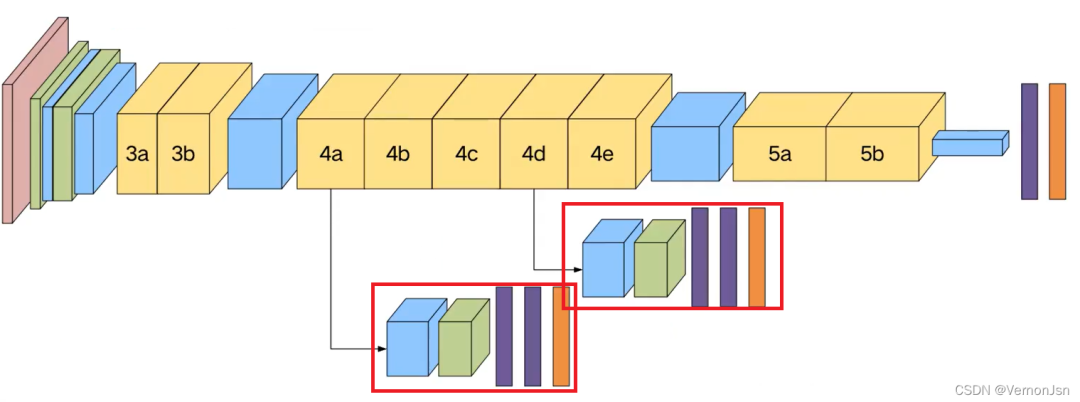
一种解决方案
➢网络的中间层具有很高的判别能力
➢在这些中间层增加辅助分类器
➢在训练中,这些中间层分类器得到的L .oss以0.3的权重加到最终Loss
3 GoogleNet的keras实现
3.0 猫狗大战
本次实战采用的数据集来自kaggle . 上的一一个竞赛: Dogs Vs. Cats

3.1 图像读取一图像增 强-图像生成器
数据增强策略
●翻转变换(lip):沿着水平或者垂直方向翻转图像;
●缩放变换(zoom):按照一定的比例放大或者缩小图像;
●平移变换(shift):在图像平面上对图像以一定方式进行平移;
●可以采用随机或人为定义的方式指定平移范围和平移步长,沿水平或竖直方向进行平移.图像内容的位置
●尺度变换(scale):对图像按照指定的尺度因子,进行放大或缩小;或者参照SIFT特征提取思想,利用指定的尺度因子对图像滤波构造尺度空间.改变图像内容的大小或模糊程度;
●对比度变换(contrast):在图像的HSV颜色空间,改变饱和度S和V亮度分量,保持色调H不变.对每个像素的S和V分量进行指数运算(指数因子在0.25到4之间),增加光照变化;
●噪声扰动(noise):对图像的每个像素RGB进行随机扰动,常用的噪声模式是椒盐噪声和高斯噪声;
代码如下:
import numpy as npfrom keras.preprocessing.image import ImageDataGeneratorfrom PIL import Imageimport matplotlib.pyplot as plt%matplotlib inlinetrain_dir="train" test_dir="test"#测试集路径IM_WIDTH=224 IM_HEIGHT=224 batch_size=32#定义训练和测试的图像生成器#train and val datatrain_val_datagen = ImageDataGenerator (rotation_range=30, width_shift_range=0.2, height_shift_range=0.2, shear_range=0.2, z0om_range=0.2, horizontal_flip=True, validation__split=0.1) #test datatest_datagen=ImageDataGenerator()
#训练集图像生成器train_generator=train_val_datagen.flow_from_directory(train_dir,
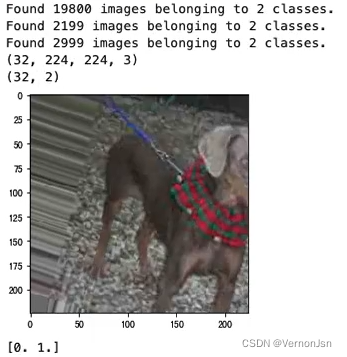
target_size=(IM_WIDTH,IM_HEIGHT), batch_size=batch_size, subset='training')#验证集图像生成器vaild_generator=train_val_datagen.flow_from_directory(train_dir, target_size=(IM_WIDTH,IM_HEIGHT), batch_size=batch_size, subset='validation')#测试集图像生成器test_generator=test_datagen.flow_from_directory(test_dir, target__size=(IM_WIDTH,IM_HEIGHT), batch_size=batch_size,)#验证图片生成器的效果,选取生成器的下一个图片并打印出来samples_batch=train_generator.next()print(samples_batch[0].shape)print(samples_batch[1].shape)
#显示一张图片fig1=samples_batch[0][0]r=Image.fromarray(fig1[:,:,0]).convert('L')g=Image.fromarray(fig1[:,:,1]).convert('L')b=Image.fromarray(fig1[:,:,2]).convert('L')image=Image.merge("RGB",(r,g,b))plt.imshow(image)plt.show()print(samples_batch[1][0])
运行结果:
3.2 自定义图像生成器
#自定义训练集生成器def myTrainDataGenerator(): while True: trainDataBatch=train_generator.next() images=trainDataBatch[0] labels= [trainDataBatch[1] , trainDataBatch[1] , trainDataBatch[1]] yield images, labels#自定义验证集生成器def myVaildDataGenerator(): while True: vaildDataBatch=vaild_generator.next() images=vaildDataBatch[0] labels= [vaildDataBatch[1] , vaildDataBatch[1] , vaildDataBatch[1]] yield images, labels#自定义测试集生成器def myTestDataGenerator(): while True: testDataBatch=test_generator.next() images=testDataBatch[0] labels= [testDataBatch[1] , testDataBatch[1] , testDataBatch[1]] yield images, labels
my_train_generator=myTrainDataGenerator()my_vaild_generator=myVaildDataGenerator()my_test_generator=myTestDataGenerator()
a=my_train_generator.__next__()#显示一张图片fig1=a[0][0]r=Image.fromarray(fig1[:,:,0]).convert('L')g=Image.fromarray(fig1[:,:,1]).convert('L')b=Image.fromarray(fig1[:,:,2]).convert('L')image=Image.merge("RGB",(r,g,b))plt.imshow(image)plt.show()print(samples_batch[1][0][0])
3.3 模型实现
#导入需要使用的包from keras.models import Modelfrom keras.layers import Input , Dense, Dropout , BatchNormalization, Conv2D , MaxPool2D , AveragePooling2D, concatenate, Flattenfrom keras.layers.convolutional import Conv2D ,MaxPooling2D, AveragePooling2Dfrom keras.callbacks import ReduceLROnPlateau,ModelCheckpoint , EarlyStoppingfrom keras.preprocessing.image import ImageDataGeneratorfrom keras.models import load_modelfrom keras.preprocessing.image import ImageDataGeneratorfrom PIL import Image#若需要复现,可以把随机数固定下来seed=42np.random.seed(seed)
#卷积+BN
def Conv2d_BN(prev_layer, filters, kernel_size, padding='same', strides=(1,1) , name=None ): if name is not None: bn_name = name+'_bn' conv_name = name +'_conv' else: bn_name = None conv_name = None x = Conv2D(filters, kernel_size, padding=padding,strides=strides , activation='relu',name=conv_name) (prev_layer) x = BatchNormalization(axis=3, name=bn_name)(x) return x
#inception模块def inception_block(prev_layer, num_filters, name, use_whistle = False, numclasses = -1):#num_filters: [b0,(b11, b12)。(b21,b22)。 b3] 代表不同分支的通道数,即卷积核个数#use_ whistle:是否要输出辅助分类器 branch0=Conv2d_BN(prev_layer=prev_layer,filters=num_filters[0],kernel_size=(1,1),name=name+'-br0-1x1') branch1=Conv2d_BN(prev_layer=prev_layer,filters=num_filters[1][0
],kernel__size=(1,1),name=name+'-br1-1x1') branch1=Conv2d_BN(prev__layer=branch1,filters=num_filters[1][1],kernel_size=(3,3),name=name+'-br1-3x3') branch2=Conv2d_BN(prev__layer=prev_layer,filters=num_filters[2][0],kernel_size=(1,1),name=name+'-br2-1x1') branch2=Conv2d_BN(prev_layer=branch2,filters=num_filters[2][1],kernelsize=(5,5),name=name+'-br2-5x5') branch3=MaxPool2D(pool_size=(3,3),strides=(1,1),padding='same',name=name+'-br3-pooL')(prev_layer) branch3=Conv2d_BN(branch3,filters=num_filters[3],kernel__size=(1,1),name=name+'-br3-1x1') x = concatenate([branch0, branch1, branch2, branch3], axis = 3,name = name) if(use_whistle): out = aux_whistle(prev_layer, numclasses = numclasses, name = name + '-whistle') return x,out return x
#辅助分类器def aux_whistle(prev_layer,numclasses,name): aux_clf=AveragePooling2D(pool_size=(5,5),strides=(3,3),name=name+'-averagePool')(prev_layer) aux_clf=Conv2d_BN(aux_clf,filters=128,kernel__size=(1,1),name=name+
'-1x1conv') aux_clf=Flatten(name=name+'-flatten')(aux_clf) aux_clf=Dense(1024,activation='relu')(aux_clf) aux_clf=Dropout(0.3,name=name+'-dropout')(aux_clf) aux_clf=Dense(num_classes,activation='softmax',name=name+'-predictions')(aux_clf) return aux_clf
def inceptionNet(input_shape,numclasses): inp=Input(shape=input_shape) x=Conv2d_BN(inp,filters=64,kernel_size=(7,7),strides=(2,2),name='2a') x=MaxPool2D(poolsize=(3,3),strides=(2,2),padding='same',name='2pool-1')(x) x=Conv2d_BN(x,filters=192,kernel_size=(3,3),name='2b') x=MaxPool2D(pool__size=(3,3),strides=(2,2),padding='same',name='2pool-2')(x) x=inception_block(x,(64,(96,128),(16,32),32),name='inception3a') x=inception_block(x,(128,(128,192),(32,96),64),name='inception3b') x=MaxPoo12D(pool_size=(3,3),strides=(2,2),padding='same',name='3pool')(x)
x=inception_block(x,(192,(96,208),(16,48),64),name='inception4a') x,whistle1=inception_block(x,(160,(112,224),(24,64),64),name='inception4b',use_whistle=True,numclasses=numclasses) x=inception_block(x,(128,(128,256),(24,64),64),name='inception4c') x,whistle2=inception_block(x,(112,(144,288),(32,64),64),name='inception4d',use_whistle=True,numclasses=numclasses) x=inception_block(x,(256,(160,320),(32,128),128),name='inception4e') x=MaxPool2D(poolsize=(3,3),strides=(2,2),padding='same',name='4pool')(x) x=inception_block(x,(256,(160,320),(32,128),128),name='inception5a') x=inception_block(x,(384,(192,384),(48,128),128),name='inception5b') x=AveragePooling2D(pool_size=(7,7),strides=(1,1),padding='valid',name='avg7x7')(x) x = Flatten (name='flatten')(x)
x = Dense(numclasses, activation= 'softmax',name= 'predictions')(x) model = Model( inp, [x, whistle1,whistle2] ,name=' inception_v1') return model
3.4 模型编译
num_classes=len(train_generator.classindices) model=inceptionNet(input_shape=(224,224,3),numclasses=num_classes)model.compile(optimizer='adam', loss='categorical_crossentropy', loss_weights=[1.0,0.3,0.3], metrics=['accuracy']) model.summary()
3.5 模型训练
EPOCH=10 #一个Epoch代表遍历- -次所有数据batch_size=32 #一 个批次内的图片数量modelfilepath='model.best.hdf5' #保存路劲#无法更优则自动终止earlyStop=EarlyStopping(monitor='val_predictions__acc', patience=30, verbose=1, mode='auto')#保存最好的模型checkpoint=ModelCheckpoint(modelfilepath, monitor='val_predictions__acc', verbose=1,
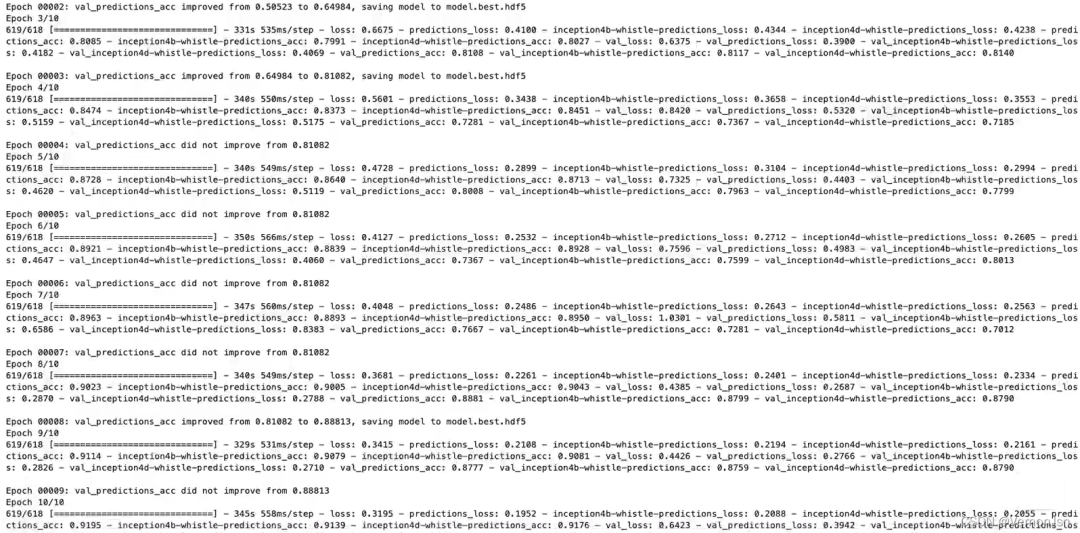
save__best_only=True, mode='max')#根据不同阶段,降低学习率reduce_Ir=ReduceLROnPlateau(monitor='val_predictions_loss', factor=0.1, patience=10, verbose=1, mode='auto', min_delta=0.00001, C0oldown=0, min__lr=0)history=model.fit_generator(my_train_generator,validation_data=my_vaild_generator,epochs=EPOCH,steps_per_epoch=train_generator.n/batch_size,validation_steps=vaild_generator.n/batch_size,callbacks=[checkpoint,reduce_lr,earlyStop])
训练结果:
3.6 模型测试
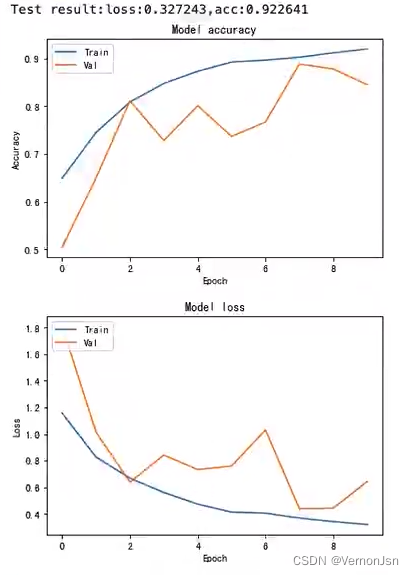
#=====模型测试=========testmodel=load_model (modelfilepath)loss,predictions_loss,aux1_loss, aux2_loss, predictions_acc,aux1_acc, aux2_acc=testmodel. evaluate_generator(my_test_generator,steps=test_generator.n/batch_size)#绘制训练&验证的准确率值plt.plot(history.history['predictions_acc'])plt.plot(history.history['val_predictions_acc'])plt.title('Model accuracy')plt.ylabel('Accuracy')
plt.xlabel('Epoch')plt.legend(['Train','Val'],loc='upper left')plt.show()#绘制训练&验证的损失值plt.plot(history.history['loss'])plt.plot(history.history['val_loss'])plt.title('Model loss')plt.ylabel('Loss')plt.xlabel('Epoch')plt.legend(['Train','Val'],loc='upper left')plt.show()
测试结果:
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。









