点云在工业界和学术界都是非常热门的研究领域,其最接近物理世界刻画的数据表征能力在机器人、自动驾驶等领域有着非常重要的应用,例如物体识别、物体跟踪、建图定位等,同时三维信息处理带来的多种任务的挑战,也是学术研究的热点问题,特别是基于深度学习的点云研究。在过去十年里,自动驾驶技术取得的巨大进步,主要得益于深度学习等技术的发展。
关于自动驾驶、三维点云、深度学习这3个词被大家所熟知,单独分开来,网上也有不少免费资源,但是面向自动驾驶,系统讲解点云处理技术以及深度学习在点云处理中的应用,目前市面上还没有。在经过充分调查和研究后,睿慕课推出了一门线上课程——《三维点云处理技术和深度学习在点云处理中的应用》,满足大家对技术的需求。
课程将以无人驾驶应用为应用背景,从激光点云数据采集和基础处理算法、到激光定位与建图基本原理、再到基于深度学习的点云分割、定位、识别等最新进展,进行全面系统的介绍,并提供大场景激光点云SLAM和基于深度学习的点云分割与识别的实践学习机会。帮助不同背景基础的研究人员和开发者建立系统化的点云知识体系,全面掌握点云采集、分割、定位、建图、识别等典型任务方法。
在基于深度学习的三维点云处理方面具有多年经验,其研究方向包括面向自动驾驶的融合感知、基于深度学习的三维点云SLAM,基于自主机器人系统控制与规划等。曾主导香港机场物流自动驾驶拖车项目的感知系统研发,并全面负责自动驾驶PRT轨道交通项目等。其所提的基于三维点云学习的动态大场景识别算法取得了当前世界最好精度,成功实现了高动态香港城市道路和复杂机场仓储环境下的实时场景识别和鲁棒闭环检测任务。 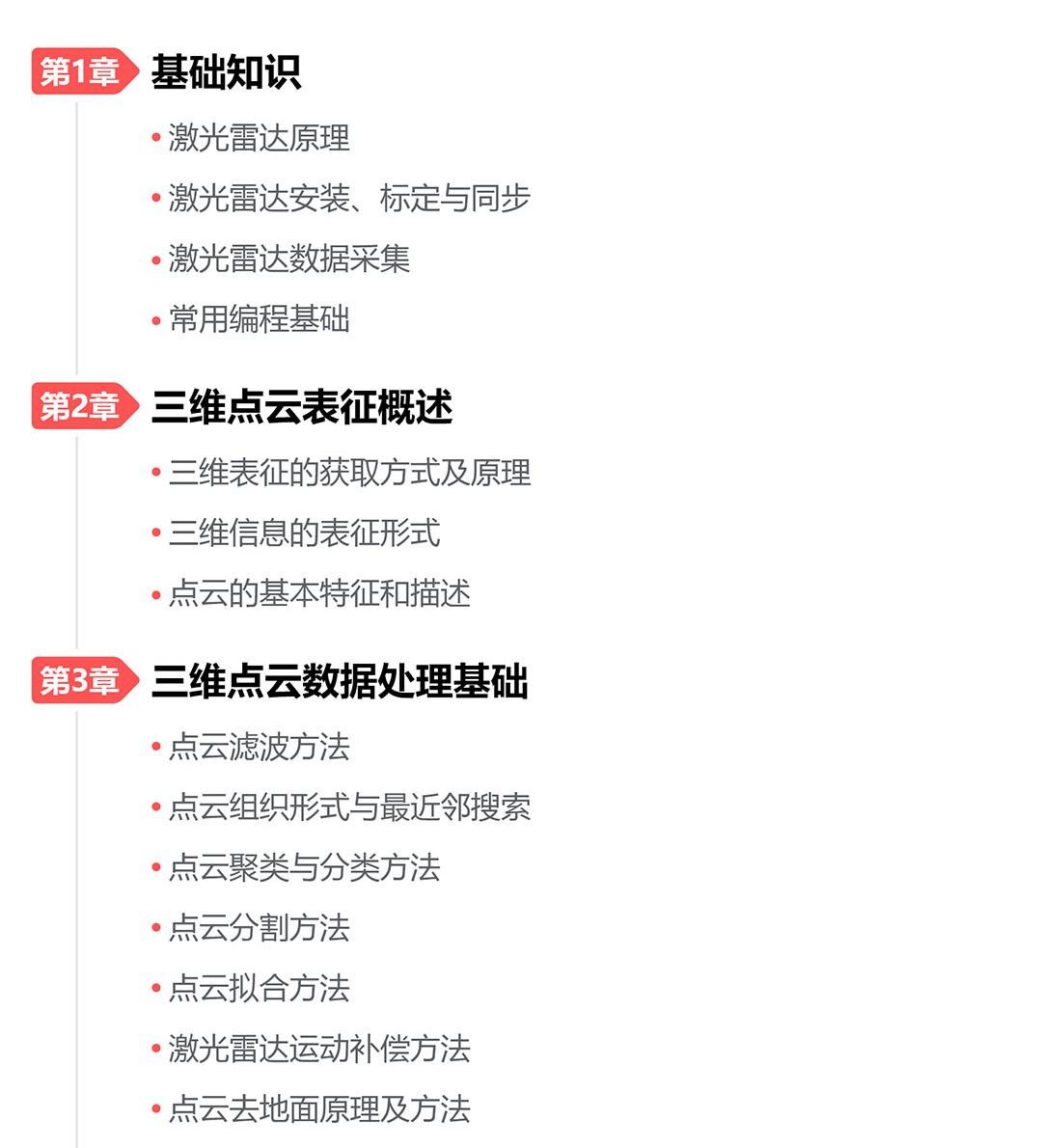





1. 掌握点云表征、滤波、聚类、分割、识别等几大核心问题
2. 熟练掌握点云空间索引结构和搜索方法,包括KD-Tree,OC-Tree等3. 根据真实公开数据集,应用并掌握不同点云聚类方法5. 学习基于特征工程的激光点云识别与跟踪算法,深入探究自动驾驶点云应用6. 深入学习经典点云深度学习模型,利用工程实践复现经典模型
 课程设置
课程设置开课时间:4月17日
学习方式:线上录播课程
开课时长:为期10周
计划安排:共13章,每周计划学习1~2章
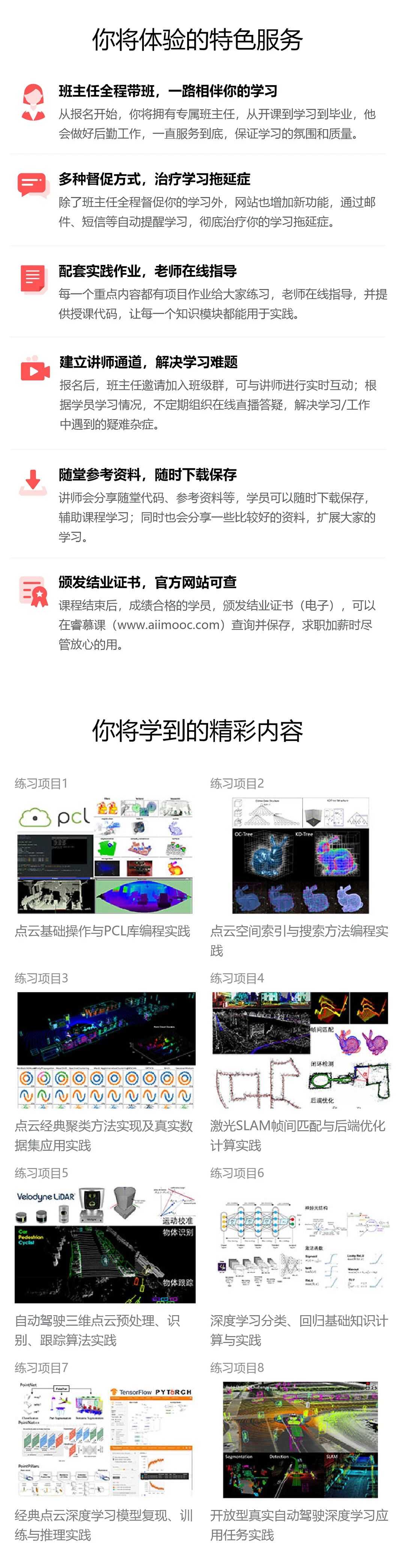
项目作业:8个练习项目
答疑渠道:班级群答疑和直播答疑
先修知识
具备一定的高数、线性代数基础知识
具备一定的C++及Python的编程基础
了解深度学习基础知识
适合人群
[案例] 资料展示
试听课:《面向大规模场景识别和环境分析的三维点云深度学习研究》









