点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

1.车牌检测:第一步是从车上检测车牌。我们将使用OpenCV中的轮廓选项来检测矩形对象以查找车牌。如果我们知道车牌的确切尺寸、颜色和大致位置,可以提高准确度。通常,检测算法是根据特定国家使用的摄像机位置和车牌类型进行训练的。如果图像中甚至没有汽车,这将变得更加棘手,在这种情况下,我们将执行额外的步骤来检测汽车,然后是车牌。
2.字符分割:一旦我们检测到车牌,我们必须将其裁剪出来并保存为新图像。同样,使用OpenCV也可以轻松地完成此操作。
3.字符识别:现在,我们在上一步中获得的新图像肯定会有一些字符(数字/字母)写在上面。因此,我们可以对其执行OCR(光学字符识别)来检测数字。
OpenCV:OpenCV是一个主要针对实时计算机视觉的编程函数库,本项目使用的是4.1.0版。
Python:使用3.6.7版。
IDE:我将在这里使用Jupyter。
Haar cascade:这是一种机器学习对象检测算法,用于识别图像或视频中的对象。
Keras:易于使用并得到广泛支持,Keras使深度学习尽可能简单。
Scikit学习:它是一个用于Python编程语言的自由软件机器学习库。
# installing OpenCV>pip install opencv-python==4.1.0# Installing Keras>pip install keras# Installing Jupyter>pip install jupyter#Installing Scikit-Learn>pip install scikit-learn
我们将从运行jupyter笔记本开始,然后在我们的案例OpenCV、Keras和sklearn中导入必要的库。
>import cv2>import numpy as np>import pandas as pd>from keras.models import Sequential>from keras.layers import Dense>from keras.layers import Dropout>from keras.layers import Flatten, MaxPool2D>from keras.layers.convolutional import Conv2D>from keras.layers.convolutional import MaxPooling2D>from keras import backend as K>from keras.utils import np_utils>from sklearn.model_selection import train_test_split
让我们从导入带牌照汽车的示例图像开始,并定义一些函数:
def
extract_plate(img): plate_img = img.copy() plate_cascade = cv2.CascadeClassifier('./indian_license_plate.xml')
plate_rect = plate_cascade.detectMultiScale(plate_img, scaleFactor = 1.3, minNeighbors = 7)
for (x,y,w,h) in plate_rect: a,b = (int(0.02*img.shape[0]), int(0.025*img.shape[1])) plate = plate_img[y+a:y+h-a, x+b:x+w-b, :] cv2.rectangle(plate_img, (x,y), (x+w, y+h), (51,51,255), 3) return plate_img, plate
上述函数的工作原理是将图像作为输入,然后应用“haar cascade”(经过预训练以检测印度车牌),这里的参数scaleFactor表示一个值,通过该值可以缩放输入图像以更好地检测车牌。minNeighbors只是一个减少误报的参数,如果该值较低,算法可能更容易给出错误识别的输出。



现在,让我们进一步处理此图像,以简化角色提取过程。我们将首先为此定义更多函数。
def segment_characters(image) :
img = cv2.resize(image, (333, 75)) img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, img_binary = cv2.threshold(img_gray, 200, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) img_erode = cv2.erode(img_binary, (3,3)) img_dilate = cv2.dilate(img_erode, (3,3))
LP_WIDTH = img_dilate.shape[0] LP_HEIGHT = img_dilate.shape[1]
img_dilate[0:3,:] = 255 img_dilate[:,0:3] = 255 img_dilate[72:75,:] = 255 img_dilate[:,330:333] = 255
dimensions = [LP_WIDTH/6, LP_WIDTH/2, LP_HEIGHT/10, 2*LP_HEIGHT/3]
char_list = find_contours(dimensions, img_dilate)
return char_list
上述函数接收图像作为输入,并对其执行以下操作:
将其调整为一个维度,使所有字符看起来清晰明了。
将彩色图像转换为灰度图像,即代替3个通道(BGR),图像只有一个8位通道,其值范围为0–255,其中0对应于黑色,255对应于白色。我们这样做是为了为下一个过程准备图像。
该图像现在是二进制形式,并准备好进行下一个进程侵蚀。
侵蚀是一个简单的过程,用于从对象边界移除不需要的像素,这意味着像素的值应为0,但其值为1。
下一步是使图像的边界变白。
我们已将图像还原为经过处理的二值图像,并准备将此图像传递给字符提取。
import numpy as npimport cv2
def find_contours(dimensions, img) :
cntrs, _ = cv2.findContours(img.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
lower_width = dimensions[0] upper_width = dimensions[1] lower_height = dimensions[2] upper_height = dimensions[3]
cntrs = sorted(cntrs, key=cv2.contourArea, reverse=True)[:15]
x_cntr_list = [] target_contours = [] img_res = [] for cntr in cntrs : intX, intY, intWidth, intHeight = cv2.boundingRect(cntr) if intWidth > lower_width and intWidth < upper_width and intHeight > lower_height and intHeight < upper_height : x_cntr_list.append(intX)
char_copy = np.zeros((44,24)) char = img[intY:intY+intHeight, intX:intX+intWidth] char = cv2.resize(char, (20, 40))
char = cv2.subtract(255, char)
char_copy[2:42, 2:22] = char char_copy[0:2, :] = 0 char_copy[:, 0:2] = 0 char_copy[42:44, :] = 0 char_copy[:, 22:24] = 0
img_res.append(char_copy)
indices = sorted(range(len(x_cntr_list)), key=lambda k: x_cntr_list[k]) img_res_copy = [] for idx in indices: img_res_copy.append(img_res[idx]) img_res = np.array(img_res_copy)
return img_res
在第4步之后,我们应该有一个干净的二进制图像来处理。在这一步中,我们将应用更多的图像处理来从车牌中提取单个字符。
#>model = Sequential()>model.add(Conv2D(filters=32, kernel_size=(5,5), input_shape=(28, 28, 1), activation='relu'))>model.add(MaxPooling2D(pool_size=(2, 2)))>model.add(Dropout(rate=0.4))>model.add(Flatten())>model.add(Dense(units=128, activation='relu'))>model.add(Dense(units=36, activation='softmax'))
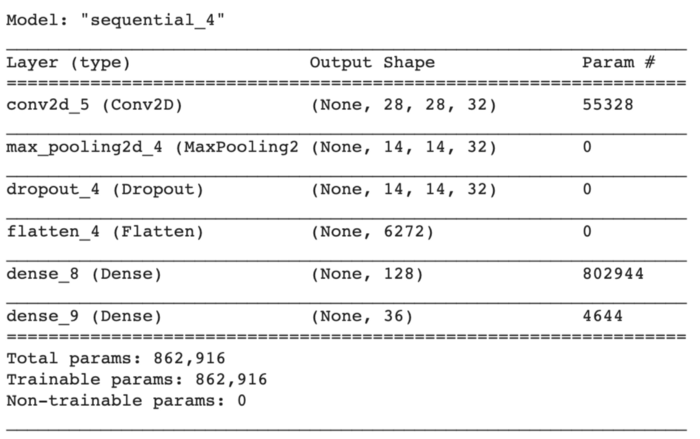
为了保持模型简单,我们将从创建一个顺序对象开始。
第一层是卷积层,具有32个输出滤波器、大小为(5,5)的卷积窗口和“Relu”作为激活函数。
接下来,我们将添加一个窗口大小为(2,2)的最大池层。
最大池是一个基于样本的离散化过程。目标是对输入表示(图像、隐藏层输出矩阵等)进行下采样,降低其维数,并允许对包含在分块子区域中的特征进行假设。
Dropout是一个正则化超参数,用于初始化以防止神经网络过度拟合。辍学是一种在训练过程中忽略随机选择的神经元的技术。他们是随机“退出”的。
现在是展平节点数据的时候了,所以我们添加了一个展平层。展平层从上一层获取数据,并以单个维度表示。
最后,我们将添加两个密集层,一个是输出空间的维数为128,激活函数为'relu',另一个是我们的最后一个层,有36个输出,用于对26个字母(A-Z)+10个数字(0-9)进行分类,激活函数为'softmax'
import datetimeclass stop_training_callback(tf.keras.callbacks.Callback): def on_epoch_end(self, epoch, logs={}): if(logs.get('val_acc') > 0.992): self.model.stop_training = True log_dir="logs/fit/" + datetime.datetime.now().strftime("%Y%m%d-%H%M%S")tensorboard_callback = tf.keras.callbacks.TensorBoard(log_dir=log_dir, histogram_freq=1)
batch_size = 1callbacks = [tensorboard_callback, stop_training_callback()]model.fit_generator(train_generator, steps_per_epoch = train_generator.samples // batch_size, validation_data = validation_generator, validation_steps = validation_generator.samples // batch_size, epochs = 80, callbacks=callbacks)
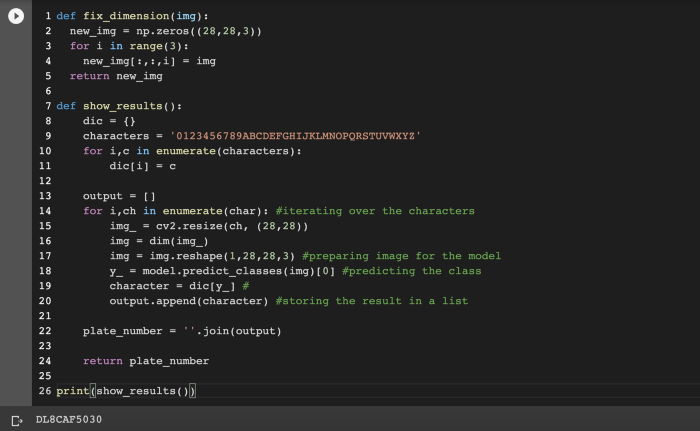
经过23个阶段的训练,模型的准确率达到99.54%。
最后,让我们将图像输入到我们的模型中。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~