在时间序列数据分析中,噪声问题是不可避免的挑战。即使在信号质量良好的情况下,原始数据仍可能包含各种干扰因素。这些噪声可能来源于传感器硬件缺陷、人工测量过程中的随机误差,或者数据本身固有的统计波动特性,这些因素都会对有效趋势信息的提取造成显著影响。
数据平滑技术为解决这一问题提供了有效途径,能够显著改善数据的可解释性和处理效率。在趋势识别和行为模式比较分析中,选择适当的平滑方法至关重要,但确定最优方法和平滑强度参数往往需要深入的技术理解。
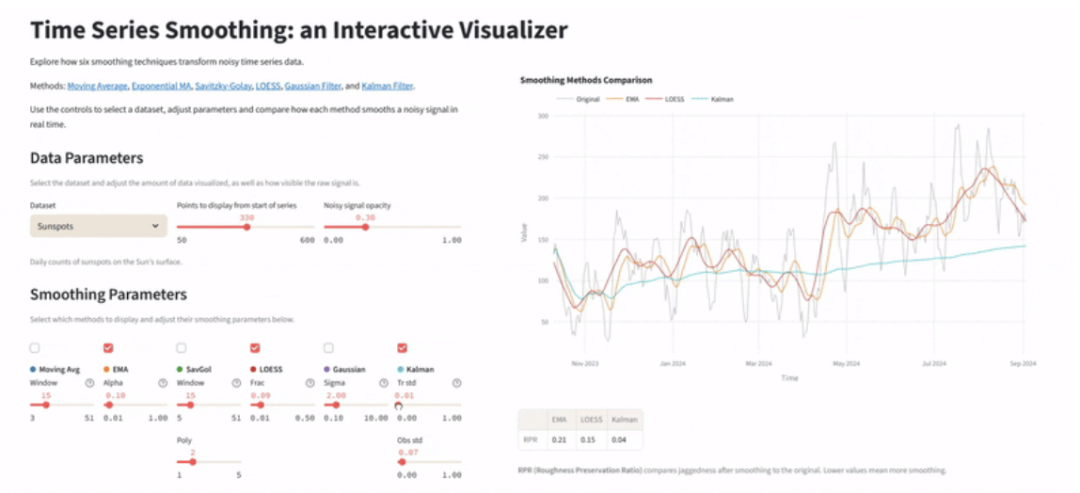
本文将系统介绍六种广泛应用的时间序列平滑技术,从技术原理、参数配置、性能特征以及适用场景等多个维度进行深入分析。文章还将介绍一种量化平滑效果的评估指标,并提供一个交互式工具用于方法对比验证。
以下将详细分析六种主流平滑方法的技术原理、核心参数配置以及各自的优势与局限性。
移动平均法(滚动均值)
移动平均法,也称为简单移动平均、滚动窗口平均或滑动窗口平均,通过计算固定数量邻近数据点的算术平均值来替换时间序列中的每个数据点。
该方法的核心机制是对每个目标点选择一个包含周围数据的窗口(例如前后各5个数据点),计算窗口内所有数值的均值作为该点的平滑值。窗口大小直接控制平滑程度,较大的窗口能产生更平滑的曲线,但同时会增加信号延迟。
移动平均法的关键参数为窗口大小(window size),即参与平均计算的数据点数量。该参数的选择需要在平滑效果和信号延迟之间找到平衡点。
该方法具有算法简单、计算效率高的优势,能够有效消除短期波动并突出长期趋势特征。然而,其固有的局限性包括:由于采用对称窗口计算,会在时间轴上引入延迟效应;对于尖峰、阶跃变化等突变特征,会产生明显的平滑失真。该方法在处理零均值平稳噪声时表现最佳,即当数据波动在时间维度上表现为对称且统计特性一致时。
指数移动平均法(EMA)
指数移动平均法采用加权平均策略对数据进行平滑处理,其核心特征是对近期观测值赋予更高权重,从而实现对信号变化的快速响应。
EMA的计算过程是将每个新数值表示为当前观测值与所有历史观测值的加权平均,权重系数按指数规律递减。这种设计使得最近的数据点具有更大的影响力。EMA属于因果滤波器,仅依赖当前和历史数据进行计算,这一特性使其特别适用于实时数据处理场景。
该方法的关键参数是平滑因子α(取值范围0到1)。较高的α值会增强近期观测值的权重,减少信号延迟但降低平滑效果;较低的α值则相反。
EMA相比简单移动平均法具有更快的响应速度,其因果性质确保了实时处理的可行性,不依赖未来数据进行计算。与居中移动平均相比,EMA引入的延迟相对较小。在流式数据处理或计算资源受限的环境中,EMA不需要维护完整的历史数据窗口,具有明显的实现优势。但是,该方法在处理快速变化信号时仍存在延迟问题,特别是当α参数较小时。
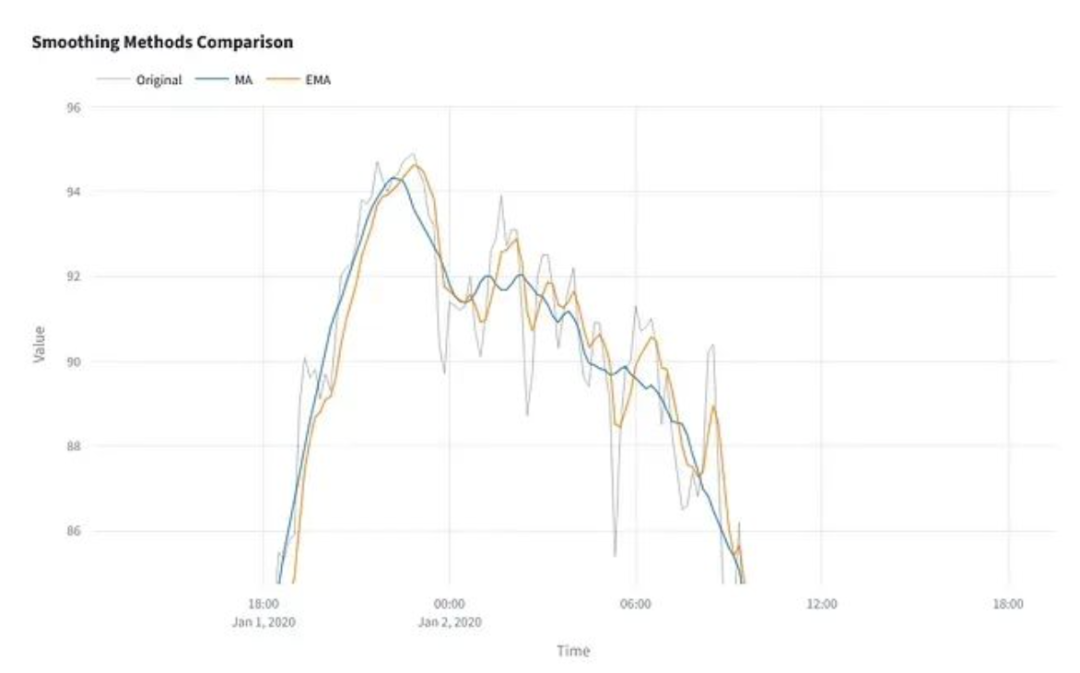
移动平均和指数移动平均平滑方法的延迟效应对比。
Savitzky-Golay滤波器
Savitzky-Golay滤波器采用局部多项式拟合的方法实现数据平滑。其基本原理是在滑动数据窗口内拟合低次多项式,然后使用多项式在窗口中心点的取值替换原始数据。这是一种在时间序列上重复应用的局部最小二乘回归方法。
具体实现过程为:对每个目标点选择对称数据窗口(如11个数据点),在该窗口内拟合指定次数的多项式(通常为2次或3次),用拟合多项式在目标位置的计算值替换原始数据点。这一过程随着窗口在整个序列上的滑动而重复执行。
该方法涉及两个关键参数:窗口大小(必须为奇数)决定了每次拟合使用的数据点数量;多项式次数控制滤波器能够表征的局部曲线复杂度,高次多项式能够跟踪更复杂的局部变化模式。
Savitzky-Golay滤波器的主要优势在于能够保持高阶统计矩特征,如斜率和曲率信息,这使其特别适合处理包含峰值、谷值或振荡等结构特征的信号。然而,当窗口尺寸过小或多项式次数过高时,可能出现过拟合现象,导致噪声放大而非抑制。
LOESS回归平滑
LOESS(局部估计散点图平滑)是一种非参数回归方法,通过为每个数据点的局部邻域拟合回归模型实现平滑效果。当采用线性拟合时,该方法也被称为LOWESS(局部加权散点图平滑)。
LOESS的工作机制是:对每个目标点,选择一定比例的邻近数据,根据距离分配权重,然后拟合局部回归模型。目标点的平滑值由该局部模型的预测值确定。这一过程在整个时间序列上重复执行。
该方法的核心参数是分数参数(frac),表示每次局部拟合中使用的数据集比例。较小的frac值使算法更紧密地跟随原始数据的局部变化。
LOESS具有良好的自适应性,能够处理非线性趋势和时变行为模式,即使在基础函数形态随时间发生变化的情况下仍能保持良好性能。与Savitzky-Golay滤波器不同,LOESS不假设数据等间距分布或固定的结构模式。但是,该方法的计算复杂度较高,因为需要为每个数据点独立执行回归计算。当frac参数过小时,可能导致过拟合和噪声增强。此外,由于边界区域的邻近点较少,边缘估计可能出现不稳定现象,某些实现会采用非对称窗口来缓解这一问题。
高斯滤波器
高斯滤波器通过应用高斯分布权重的加权移动平均实现时间序列平滑。与简单移动平均给窗口内所有点等权重不同,高斯滤波器对靠近中心的数据点赋予更高权重,对距离较远的点赋予较低权重,权重分布遵循高斯(正态)分布模式。
该方法的实现过程是:对每个目标点,使用以该点为中心的对称高斯核函数计算邻近数值的加权和。核函数的形状由标准差参数σ控制,该参数决定权重衰减的速率,但不直接控制窗口大小。
高斯滤波器的关键参数是标准差σ,用于控制权重分布的展开程度。较小的σ值保持窗口的响应性,适合保持信号细节;较大的σ值实现更广泛的平滑效果。
该方法能够产生平滑的处理结果,相比简单移动平均具有更少的边缘效应。当需要在降噪的同时避免完全扁平化信号时,高斯滤波器是理想选择。该技术在图像处理和信号处理领域应用广泛。然而,与其他非自适应滤波器(移动平均、EMA、Savitzky-Golay)类似,高斯滤波器在整个序列上应用统一的平滑策略,即使在信号快速变化的区域也是如此。这可能导致尖锐边缘模糊、峰值扁平化,以及突变响应延迟等问题。
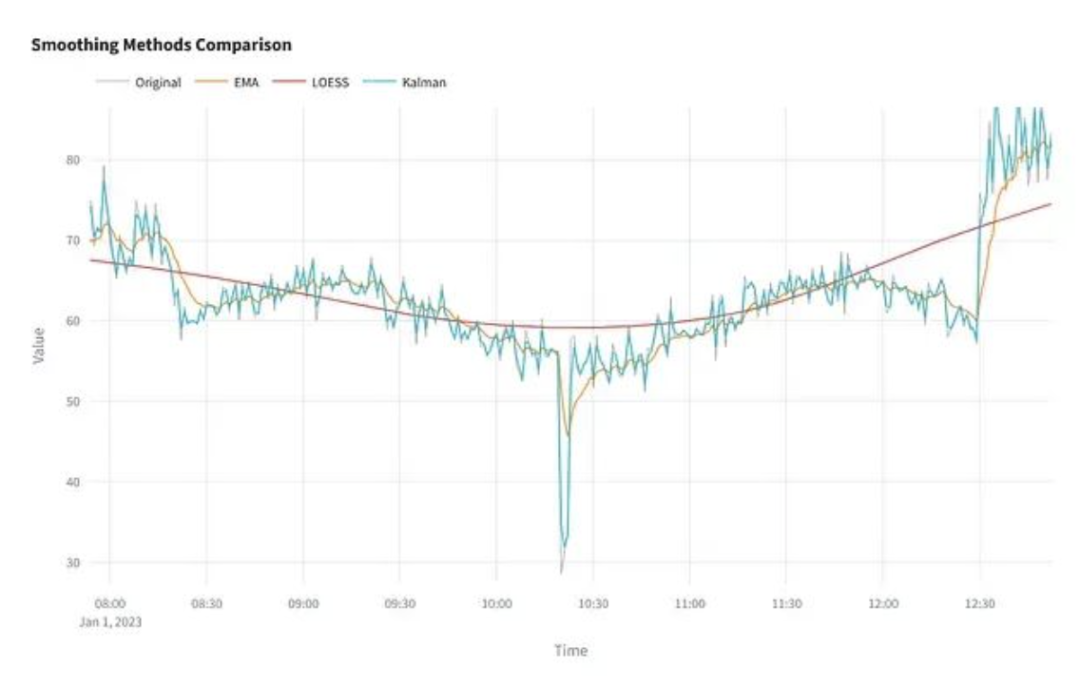
EMA、LOESS和卡尔曼滤波器在噪声数据上的平滑效果对比。
卡尔曼滤波器
卡尔曼滤波器是一种基于概率论的递归估计算法,专用于从噪声观测数据中估计系统的潜在状态。该算法在每个时间步骤都会基于过程模型进行状态预测,将预测结果与观测数据进行比较,然后更新状态估计以在模型预测和实际测量之间达到最优平衡。与EMA类似,卡尔曼滤波器也属于因果平滑方法。
卡尔曼滤波器基于以下假设:信号由遵循线性动态规律且包含高斯噪声的系统生成。滤波器同时跟踪两个关键要素:状态估计(对真实值的最佳估计)和该估计的不确定性度量。当新的观测数据到达时,算法采用加权平均策略融合预测值和观测值,置信度更高的估计将获得更大的权重。
该方法包含两个关键参数:过程噪声标准差(transition_std)描述系统内部过程的噪声水平或不可预测程度;观测噪声标准差(observation_std)描述测量数据的噪声水平。这两个参数共同决定滤波器对模型预测与新观测数据的相对信任程度。
卡尔曼滤波器在处理时变噪声和缺失数据方面表现优异,具有良好的自适应性,能够平滑地跟踪渐进变化。该技术在控制系统、金融分析和传感器数据融合等领域得到广泛应用。然而,卡尔曼滤波器的计算复杂度相对较高,因为需要在每个时间步骤维护和更新状态估计及其不确定性信息。该方法要求建立准确的过程模型,当实际系统表现为非线性、非高斯或高度不规则特性时,标准卡尔曼滤波器可能出现发散或不可预测的行为(对于非线性系统,需要采用扩展卡尔曼滤波器或无迹卡尔曼滤波器等变种)。此外,噪声参数的准确调节对算法性能至关重要,不当的参数设置可能导致过度平滑或噪声放大等问题。
各种平滑方法都有其特定的适用场景。对于仅需抑制快速波动的应用,移动平均或EMA通常已足够。当需要保持峰值和曲率等信号特征时,Savitzky-Golay滤波器或LOESS可能更适合。高斯滤波器在需要平滑效果但要求参数调节简便的场景中是理想选择。卡尔曼滤波器虽然复杂度较高,但在需要适应动态变化或复杂噪声环境的系统中具有其他方法无法比拟的优势。
实际数据平滑的技术挑战
实际应用中的时间序列数据通常具有采样不规则、数据缺失以及变化速率混合等复杂特征。例如,物联网传感器可能出现数据丢失或以不等间隔进行数据报告,这些因素都会增加数据解释的难度。
大多数平滑方法都假设数据具有规则性和完整性。当存在数据缺失时,可能需要预先进行插值或数据填补处理,或者选择如卡尔曼滤波器等能够直接处理数据间隙的方法。
在流式数据或实时处理场景中,无法获取未来时刻的数据值,这对许多依赖对称窗口的滤波方法构成限制。因果滤波器如后向窗口移动平均、EMA和卡尔曼滤波器更适合此类应用,因为它们仅使用当前和历史数据进行状态更新。
这些技术挑战使得参数选择和自动化结果验证变得更加困难。视觉检查仍然是判断平滑效果的最可靠方法。为了定量评估平滑程度,我们可以采用以下相对简便的评估指标:
基于RPR指标的平滑度量化分析

三种不同平滑方法的RPR指标递增效果展示。粗糙度保持比(RPR, Roughness Preservation Ratio)用于量化信号在平滑处理后保留的短期变异程度(即"粗糙度")。该指标基于总变异度量,定义为连续数据点间绝对差值的累积和:
RPR = ∑ |ŷᵢ₊₁ − ŷᵢ| / ∑ |yᵢ₊₁ − yᵢ|
即:
RPR = total_variation(smoothed) / total_variation(original)
RPR数值通常分布在0到1的区间内。接近1的数值表示平滑程度较轻,接近0的数值反映较强的平滑效果。当处理方法增加局部变异时,RPR值可能超过1。
需要注意的是,该指标仅测量信号锯齿状特征的减少程度,不评估信号整体形状的保持情况。RPR指标在比较不同方法对同一数据集的平滑强度时具有实用价值。
总结
不同的平滑方法在响应时间序列数据中的噪声、趋势和结构特征方面表现出显著差异。没有单一方法能够在所有应用场景中达到最优效果,合适的选择需要综合考虑数据特征和分析目标的具体要求。
对于数据质量较好且主要目标是减少轻微波动的应用,简单移动平均或Savitzky-Golay滤波器通常能够提供良好效果。在流式数据或实时分析场景中,EMA或卡尔曼滤波器可能更为适合。当信号包含非线性模式或时变行为特征时,LOESS是优秀的选择,尽管其计算开销相对较高。
本文介绍的技术集合具有实用价值,但并非详尽无遗。其他方法如样条平滑或基于小波变换的技术可能在特定应用中表现更优。结果可视化对于方法评估至关重要。虽然RPR等指标有助于参数设置的比较,但图形化展示通常能够更直观地揭示方法是否保持了信号结构或造成了过度平滑。
深入理解这些技术权衡有助于避免常见误区,建立对信号更可靠的分析和解释框架。
相关代码实现可访问:https://github.com/dbolotov/ts_smoothing_visualizer









