项目地址:https://github.com/GrowingGit/GitHub-Chinese-Top-Charts
你还在寻找GitHub中文资料而发愁吗?你还在GitHub因为英文不好而犯难吗?你还在找不到中文组织而难过吗?
GitHub中文排行榜「帮助你发现优秀中文项目,可以无语言障碍地、更高效地吸收优秀经验成果」

项目特色亮点
筛选出有中文文档的项目进行排名,帮助大家更低门槛探索优秀开源项目,打破语言障碍;中文项目既包含国产好项目,也包含国外优质的含中文文档的项目;评选逻辑是保持活跃+总星数;
帮助大家发现增速较快的项目,优秀不止于老项目;评选逻辑是保持活跃+日均涨星数;

帮助大家发现近一年的潜力新项目,后起之秀就在这里;评选逻辑是保持活跃+近一年内创建的较高星项目;

破除软件与资料项目互相干扰视线的烦恼,让大家更精准、高效地找到各自所需项目;存在即是合理,项目无分贵贱,大家能高效各取所需才是最重要的;
泛指一切包含中文文档/说明的项目:readme主语言是中文;readme主语言是英文,但有中文版本;readme主语言是英文,但wiki有中文文档;readme主语言是英文,但项目官网有中文文档;这里也推荐工坊推出的新课程《国内首个面向三维视觉的科研方法与学术论文写作教程》。
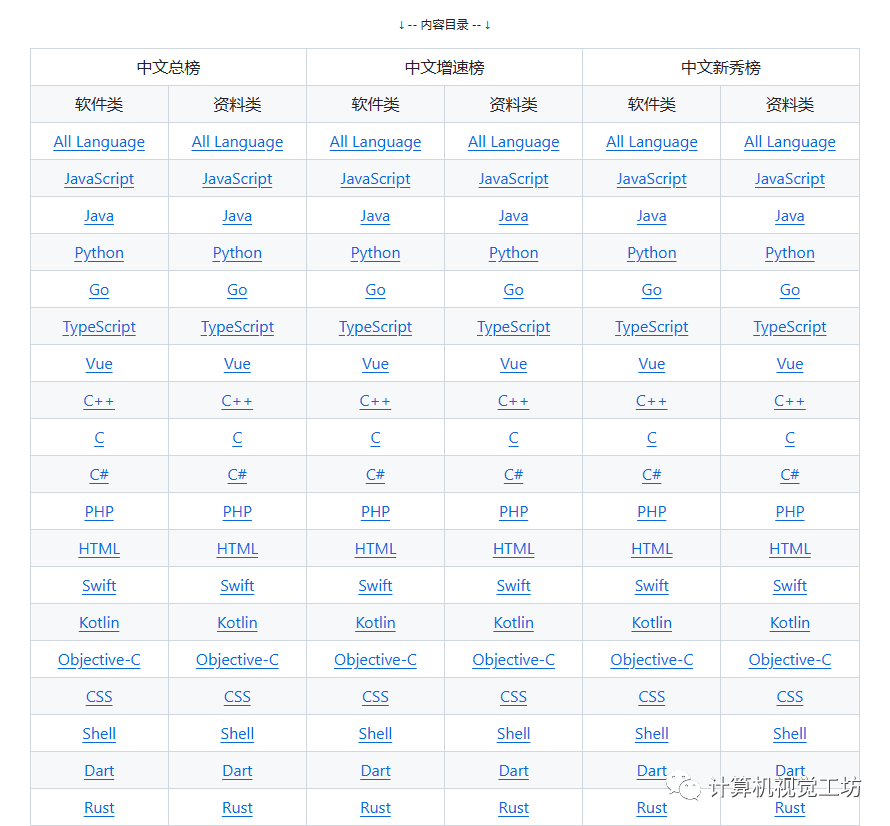
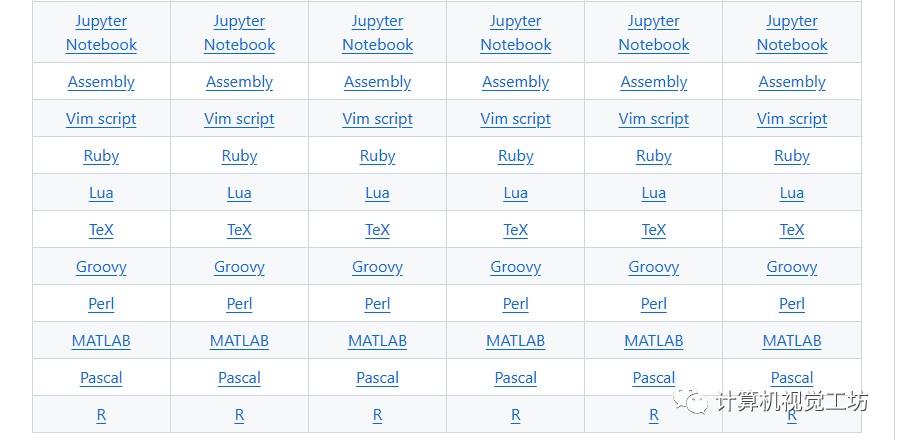
内容目录
使用方法
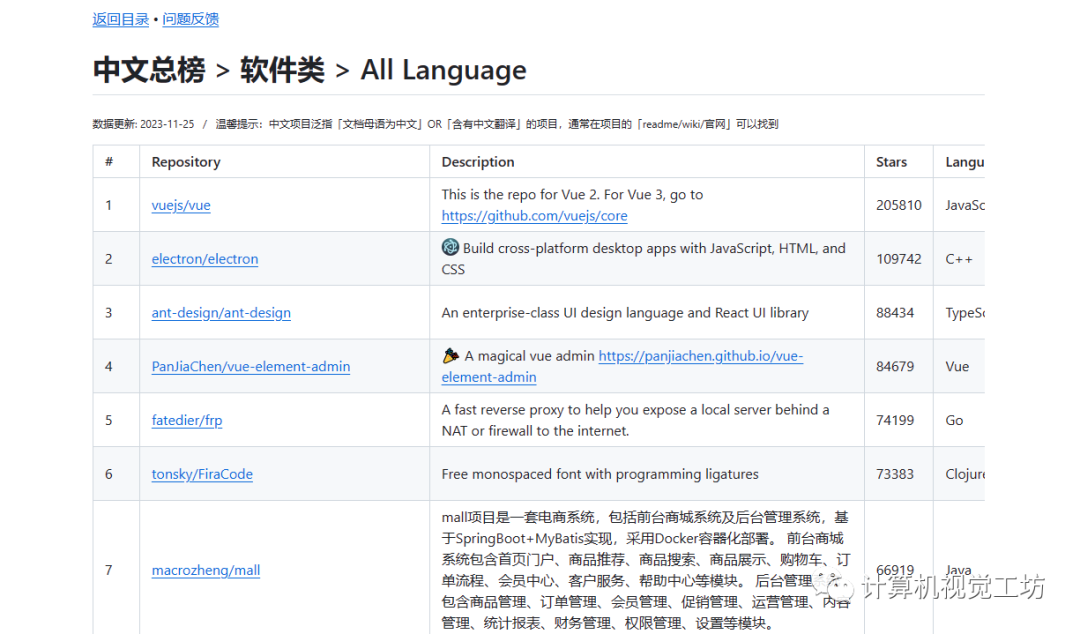
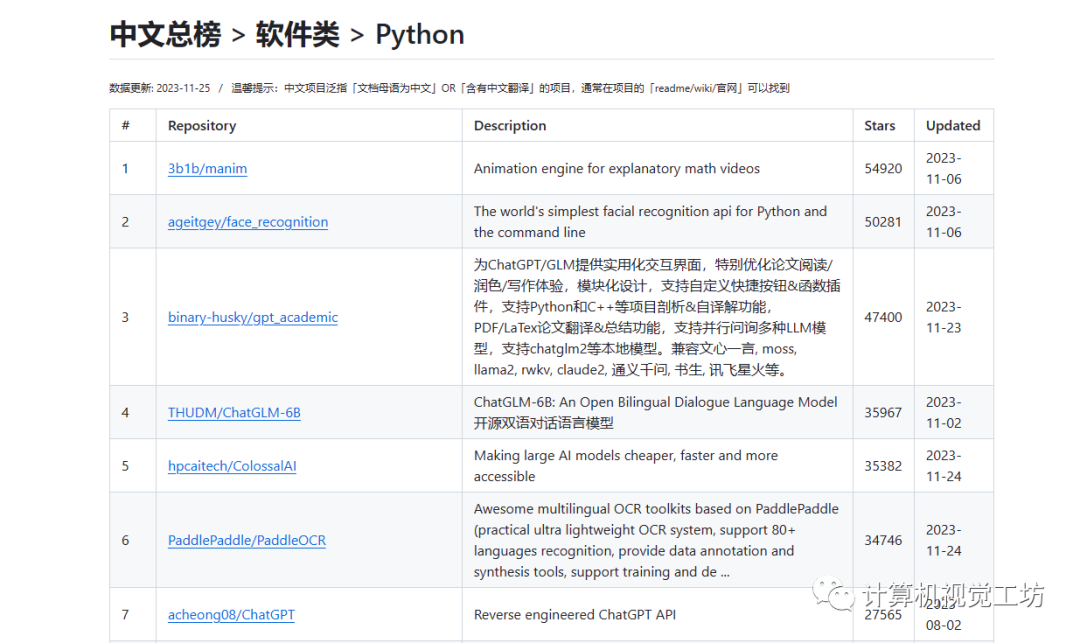
我们可以点击选择想要查看的内容排行榜,例如:中文总榜 > 软件类 > Python.
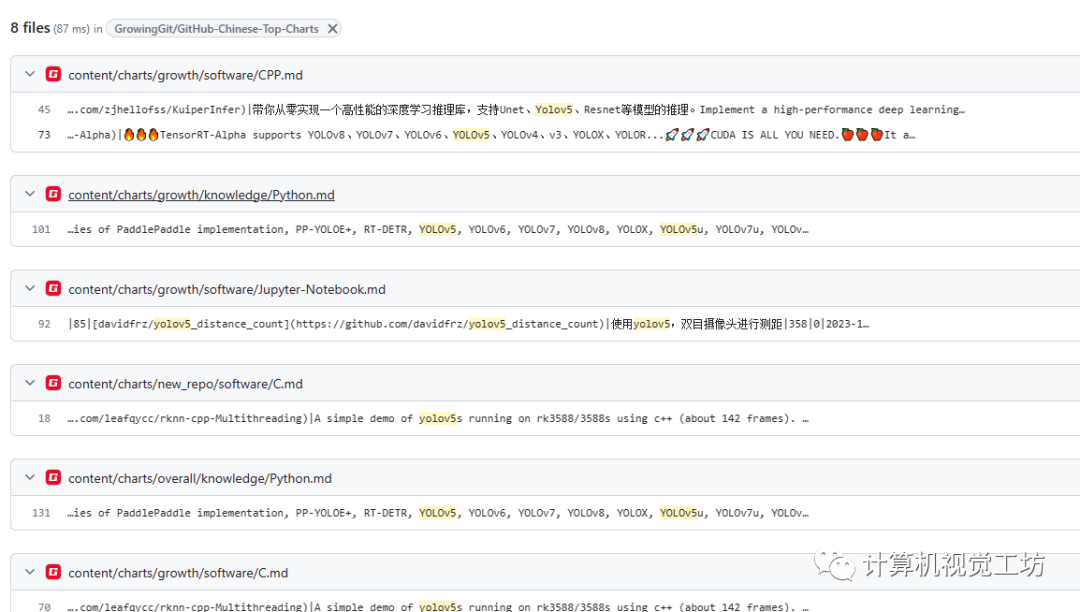
也可以搜索相关关键词:

就可以找到很多相关的中文资料。

总之,拥有GitHub中文排行榜,你就相当于拥有了整个GitHub所有编程语言的资料,GitHub中文排行榜筛选出有中文文档的项目进行排名,降低了大家探索优秀开源项目的门槛。
计算机视觉方向交流群成立啦
目前咱们计算机视觉工坊已经建立了多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光(面/线/散斑)、机械臂抓取(2D/3D)、2D缺陷检测、3D缺陷检测、6D位姿估计、相位偏折术、Halcon、光场重建、摄影测量、阵列相机、偏振三维测量、光度立体视觉、激光雷达、综合群等。
[SLAM]视觉SLAM、激光SLAM、ORB-SLAM、Vins-Fusion、LOAM/LeGo-LOAM、cartographer、VIO、语义SLAM、滤波算法、多传感器融合、多传感器标定、MSCKF、动态SLAM、MOT SLAM、NeRF SLAM、FAST-LIO、LVI-SAM、LIO-SAM、事件相机/GPS/RTK/UWB/IMU/码盘/TOF(iToF/dToF)/激光雷达/气压计/毫米波雷达/RGB-D相机/超声波等、机器人导航、综合群等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪、综合群等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信: dddvision,备注:加群+方向+学校|公司, 小助理会拉你入群。
 ▲长按添加小助理微信:dddvision,加群+方向+学校|公司,拉你入群
▲长按添加小助理微信:dddvision,加群+方向+学校|公司,拉你入群加入知识星球,与6000多位同行一起进步
「3D视觉从入门到精通」知识星球,依托于微信公众号「3D视觉工坊」、「计算机视觉工坊」、「3DCV」平台,星球内除了包含3D视觉独家秘制视频课程(近20门,包括三维重建、三维点云、手眼标定、相机标定、3D目标检测、深度估计、ORB-SLAM3、Vins-Fusion、激光-视觉-IMU-GPS融合、机械臂抓取等)、3D视觉项目对接、3D视觉学习路线、最新论文&代码分享、入门书籍推荐、源码汇总、最新行业模组分享、编程基础&作业、求职招聘&面经&面试题等,更有各类大厂的算法工程人员进行技术指导。目前星球铁杆粉丝已近6000+,让我们一起探索更其妙的3D视觉技术、为祖国的创新发展贡献自己的一份力。知识星球入口:3D视觉从入门到精通