
随着大模型在自动驾驶行业的深入应用,华为、小鹏、特斯拉、元戎启行、大疆车载等纷纷落地3.0高阶智能驾驶技术,并在预研4.0端到端的智驾方案。那么何为自动驾驶3.0呢?与2.0最大的不同在于,自动驾驶3.0采用BEV+transformer的技术路线替代CNN为主导的深度学习路线,开启了以大数据、大模型为特征、数据驱动的自动驾驶时代。基于
BEV+transformer,行业开始研发无图智驾(mapless),开始探索端到端的4.0智驾技术的可行性(行业内更认可感知-预测-决策的端到端方案,后续再接入传统的运动规划+控制)。
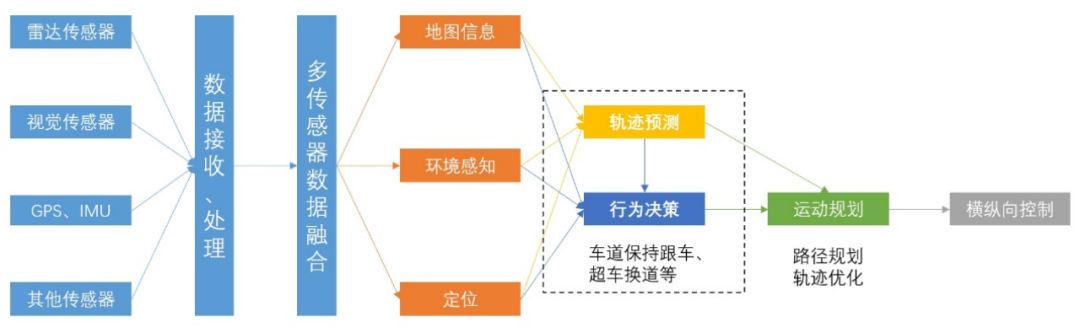
图1 自动驾驶系统组成
不论是自动驾驶2.0,还是自动驾驶3.0、4
.0,轨迹预测以及行为决策要解决的问题始终存在。比如,匝道汇入场景、无保护左转场景、城中村骑行与行人交互场景等,准确理解其他交通参与者的意图并能在不确定性因素下进行自车决策是自动驾驶走向更广泛应用的关键所在。所以说,预测与决策始终是机器人与自动驾驶的刚需。
现有的预测方法,基本以基于深度学习的网络为主
,而现有的决策方法,则以比较传统的方法为主。为了满足自动驾驶实际用人需求,深蓝学院开设了「自动驾驶预测与决策规划」课程。通过学习本课程,可以逐步理解自动驾驶决策的建模方法和预测决策两个任务的交互,并在复杂场景下完成预测决策的典型实现。复旦大学工程与应用技术研究院,青年研究员。博士毕业于香港科技大学电子及计算机工程系,曾任职华为车BU,致力于智能驾驶预测决策方面研究。近5年来以第一/通讯作者身份在TRO、JFR、RAL、ICRA等机器人领域顶级期刊和会议上发表高质量论文十余篇。曾以华为“天才少年”身份,在华为车BU担任预测领域技术专家,作为核心贡献者参与打造了华为ADS1.0以及ADS2.0智能驾驶系统,贡献了业界领先的智能驾驶预测方案,并实现在北汽极狐、长安阿维塔以及问界2023智驾版等多款车型上的商用。在复旦,担任集群机器人系统实验室(MagicLab)负责人,致力于打造面向机器人和智能驾驶的高阶人工智能。1. 掌握基于数据驱动的预测算法,灵活使用深度网络完成交通参与者意图和轨迹预测
2. 掌握不确定性下的决策算法,深入理解自动驾驶决策的建模方法和手段
3. 深入理解预测和决策两个任务的交互,并在复杂场景下完成预测决策的典型实现。
1.自动驾驶企业中的预测或者PnC工程师
2.高校或者企业中从事预测或者planning研究的同学3.对量产自动驾驶和新一代自动驾驶技术有兴趣的爱好者讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。









