本推文来源:塔景Lab
文献分享
邻里视觉可步性中的社会不平等:使用街景图像和深度学习技术促进健康城市规划
声明:该论文为实验室读到的优秀文章的笔记分享,非本推文作者首发,原文链接:https://www.sciencedirect.com/science/article/pii/S2210670718327483
本研究首先提出了理解街道视觉步行性的概念框架,然后利用深度学习技术对百度地图街景(BMSV)图像中的物理特征进行分割和提取,同时考虑了行人需求和心理满意度,以衡量邻里视觉步行能力,并分析社会人口学信息是否随不同社区视觉步行性的变化而变化。
研究区域
深圳市
研究数据
从百度地图街景中下载街景图像,删除不能用于计算视觉步行性的街道站点,保留了2213个样本站点。
物理特征检测:SegNet训练、像素语义分割和修改
SegNet从监督学习中学习预测像素级类标签,需要一个具有相应地面实况标签的输入图像数据集。
输入图像数据集为一个标记的街景图像数据集,其中包含 351 张道路场景的训练图像和 203 张测试图像。该数据集是通过使用 InteractLabeler 软件标记抓取的
BMSV 图像来生成的。 在获得初始影像分割后,对前一类与视觉步行性相关性较弱的像素进行重分类,包括杆、道路标记和标志符号。
在获得初始影像分割后,对前一类与视觉步行性相关性较弱的像素进行重分类,包括杆、道路标记和标志符号。
通过识别周围的像素来消除火花点,得到最终的分割结果。
计算视觉可步性指数IVW
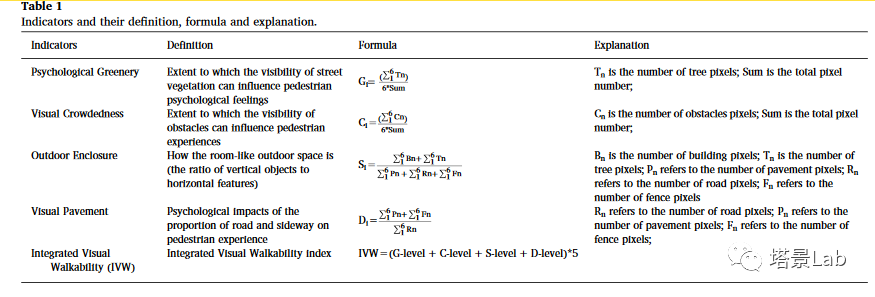
使用四个维度的指标来近似可步性,即心理绿度、视觉拥挤度、外界包围度、视觉路面,对每个指标的评级分为五类,范围从1到5,值越高,指标表现越好。
将四个子指数生成为综合视觉步行能力 (IVW)。IVW值范围为20-100,从人类视觉感知的角度来看,该值越高,建筑环境质量对行人活动越有吸引力。
IVW的有效性
第一种方法测试评估的视觉可行步性与人工解释输出之间的一致性。使用Pearson的秩相关分析计算计算的IVW与研究分数之间的一致性。
第二种方法测试IVW与图像主观评分结果之间的一致性。通过问卷调查的方法确定受访者的感知分数。
使用Pearson相关性分析计算计算出的IVW与受访者分数之间的一致性。
空间回归
采用空间回归来检查社区社会人口学特征与 15 分钟步行距离内的平均 IVW 值相关联。
空间回归的形式,空间滞后(方程1)或误差(方程2)是参考鲁棒拉格朗日乘子选择的,使用最近邻距离矩阵。

IVW的分割准确性和验证
通过人工解释的方法,根据研究人员指定的视觉步行指数(r = 0.81,P < 0.01)将BMSV图像准确地分配到不同的级别。此外,视觉步行指数与主观评分呈显著正相关(r = 0.73,P < 0.01),证明了视觉可步行性指数在表征行人行走感受方面的潜力。
街道视觉步行性的空间格局
深圳西南部街道(如南山区、福田区)的心理绿化程度普遍高于北部街道。
市中心的视觉拥挤程度比比外围地区要高得多。
在综合视觉步行性方面,可以看出,无论是市中心还是外围区域的中间部分的景点都呈现出更高的价值。
超过一半的社区被赋予了相对较高的视觉步行水平。
高密度集聚区(地区的核心区)内的一些社区不太可能享有良好的主观步行性。
视觉可步性的社会不平等
在回归模型中,除独居和儿童外,所有变量都与IVW显著相关。
可步性与社会经济地位呈负相关。相比之下,老年人群和受过高等教育的人往往居住在更适合步行的社区。
这些结果表明,不同社区在视觉步行性方面存在社会不平等。
一是充分考虑行人需求和心理满意度,开发了一个系统的视觉可步行性框架,生成了四个度量指标和一个综合的视觉可步行性指数;二是量化了视觉可步性相关的社会不平等。










