为了方便各位同学交流学习,解决讨论问题,我们建立了一些微信群,作为互助交流的平台。2.告知:姓名-课题组-研究方向,由编辑审核后邀请至对应交流群(生长,物性,器件);欢迎投稿欢迎课题组投递中文宣传稿,免费宣传成果,发布招聘广告,具体联系人:13162018291(微信同号)
成果介绍
为追求类人交互体验,柔性压力传感器已广泛应用于机器人和机械设备中,其结构与材料的多样性实现了不同的性能表现。传统柔性压力传感器的设计方法需经历多次制造迭代,过程耗时且由于无法同时优化所有制造参数,往往仅能获得局部最优器件。
近日,清华大学田禾副教授、任天令教授、博士后耿祥顺(共同通讯作者)提出一种机器学习驱动的柔性压力传感器逆向设计策略,实现了激光直写石墨烯结构的性能预测与六维参数优化。首先通过主动学习构建了包含六个关键参数的120组器件数据集,随后训练并测试了包含可行性分类器、量程预测器和性能预测器的三阶段机器学习模型,成功实现了对45000种器件构型的性能预测。基于此策略,研究一次性设计出可在应用所需量程内达到最佳灵敏度的柔性压力传感器,在激光直写/诱导石墨烯基柔性压力传感器类别中创造了超过550 kPa的突破性量程纪录。最终,依据预测模型指导制备了两种不同量程的柔性压力传感器,分别适配机械臂夹具和仿人机器人,实现了抓握力监测与足部姿态识别的创新应用。
图文导读
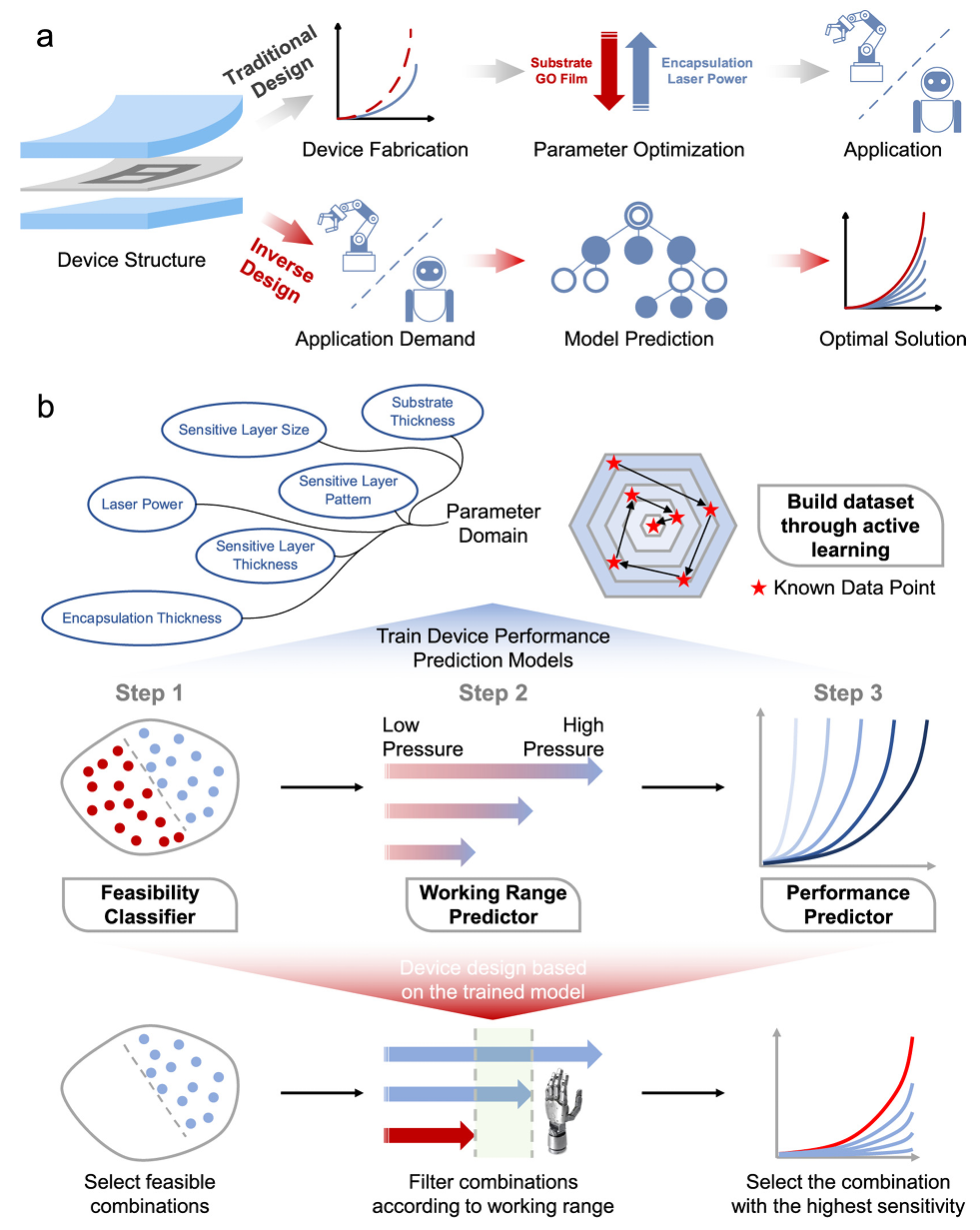
图1. 机器学习驱动的柔性压力传感器设计策略示意图。a. 传统设计与逆向设计流程对比。b.
机器学习驱动设计策略的具体实现,包括基于主动学习的参数域遍历及三阶段机器学习模型。该三阶段模型逐步实现器件可行性分类、量程预测与性能预测功能。
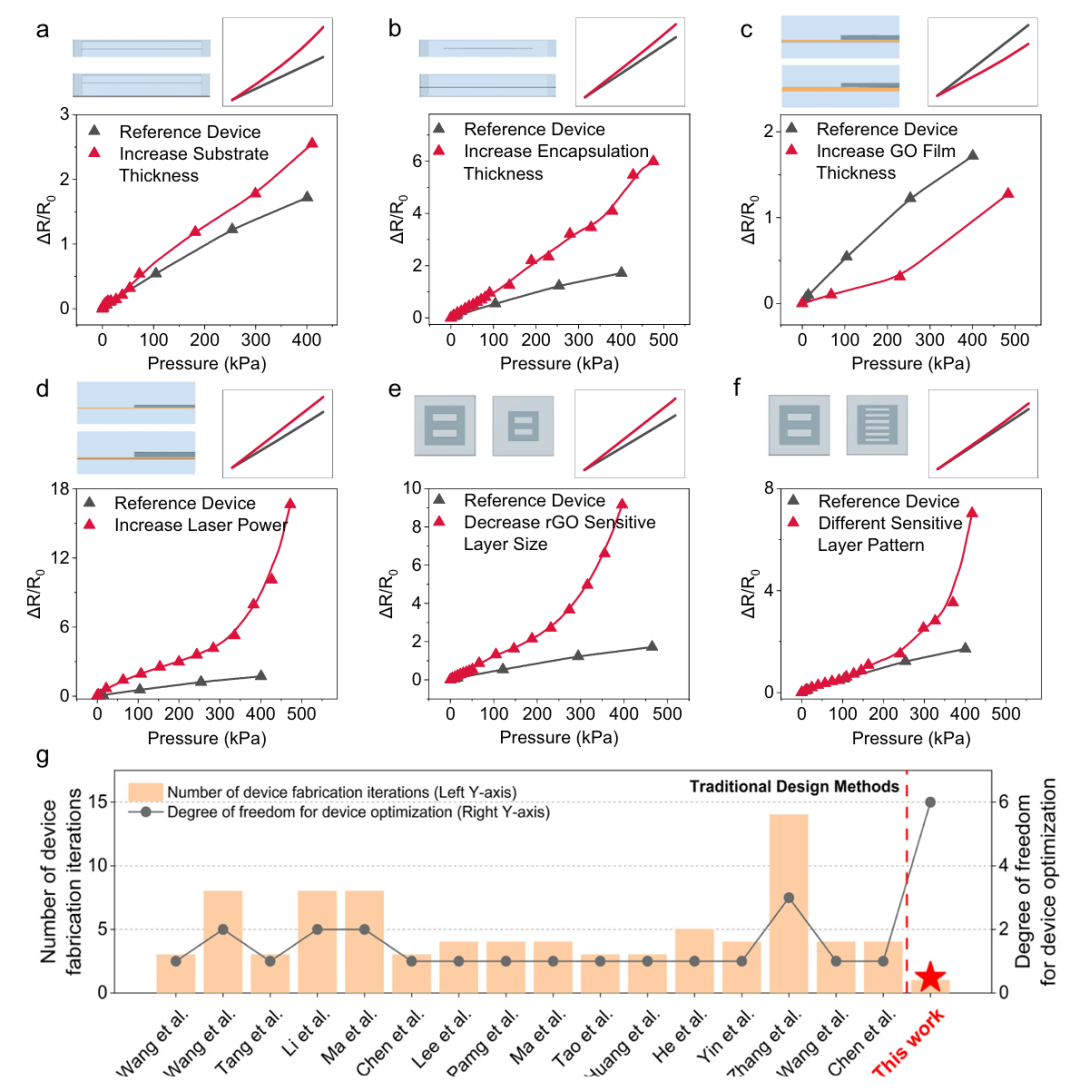
图2. 关键参数验证与最终优化目标。a. 通过对比参照器件,展示基底厚度增加时器件的结构调控及性能结果(右上为仿真,底部为实验);以及封装层厚度增加(b)、氧化石墨烯薄膜厚度增加(c)、激光功率增加(d)、还原氧化石墨烯敏感层尺寸减小(e)和不同敏感层图案(f)的器件对比。g. 柔性压力传感器制造迭代次数与优化自由度基准对比。采用本研究所提出的机器学习驱动设计策略,仅需单次制造即可实现六参数的同步优化。
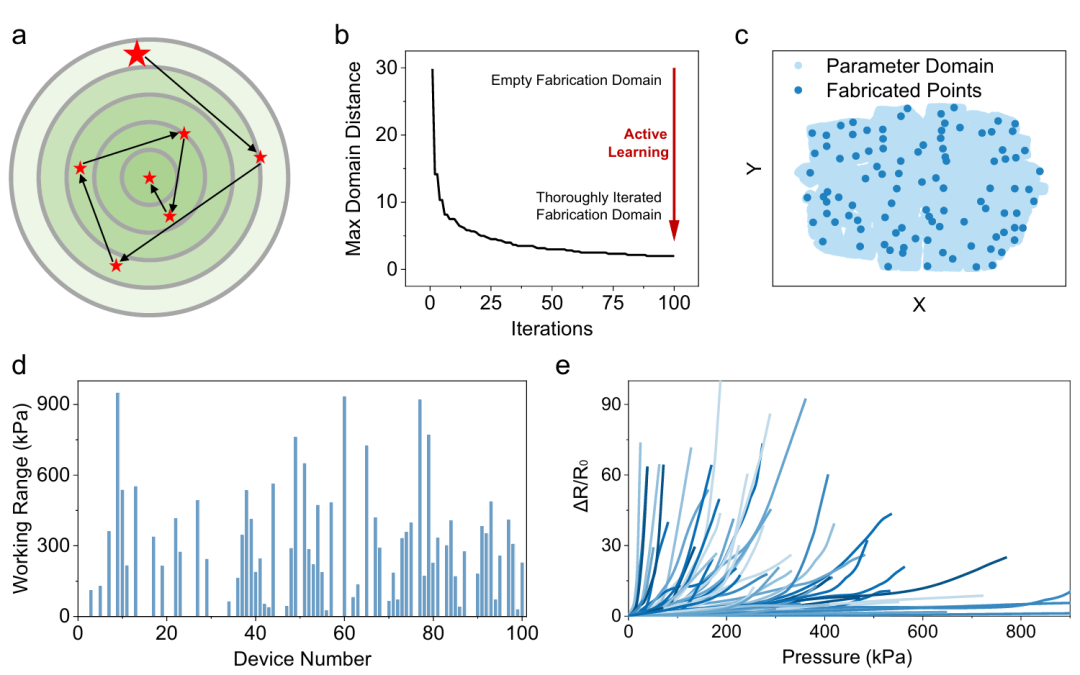
图3. 基于主动学习策略构建的数据集。a. 主动学习策略示意图,该策略从边界向中心遍历参数域。b. 主动学习迭代次数与已知/未知器件参数最大域间距的关系。经过100次迭代后,制造参数域被完全遍历,已知与未知器件间仅剩余不足两个数据点间距。c. 二维映射下的参数域与已制造域可视化展示。d. 训练集中器件的量程分布,形成前两个模型所需的可行性数据集与量程数据集。e. 训练集中功能器件的性能曲线,构成第三个预测模型的性能数据集。
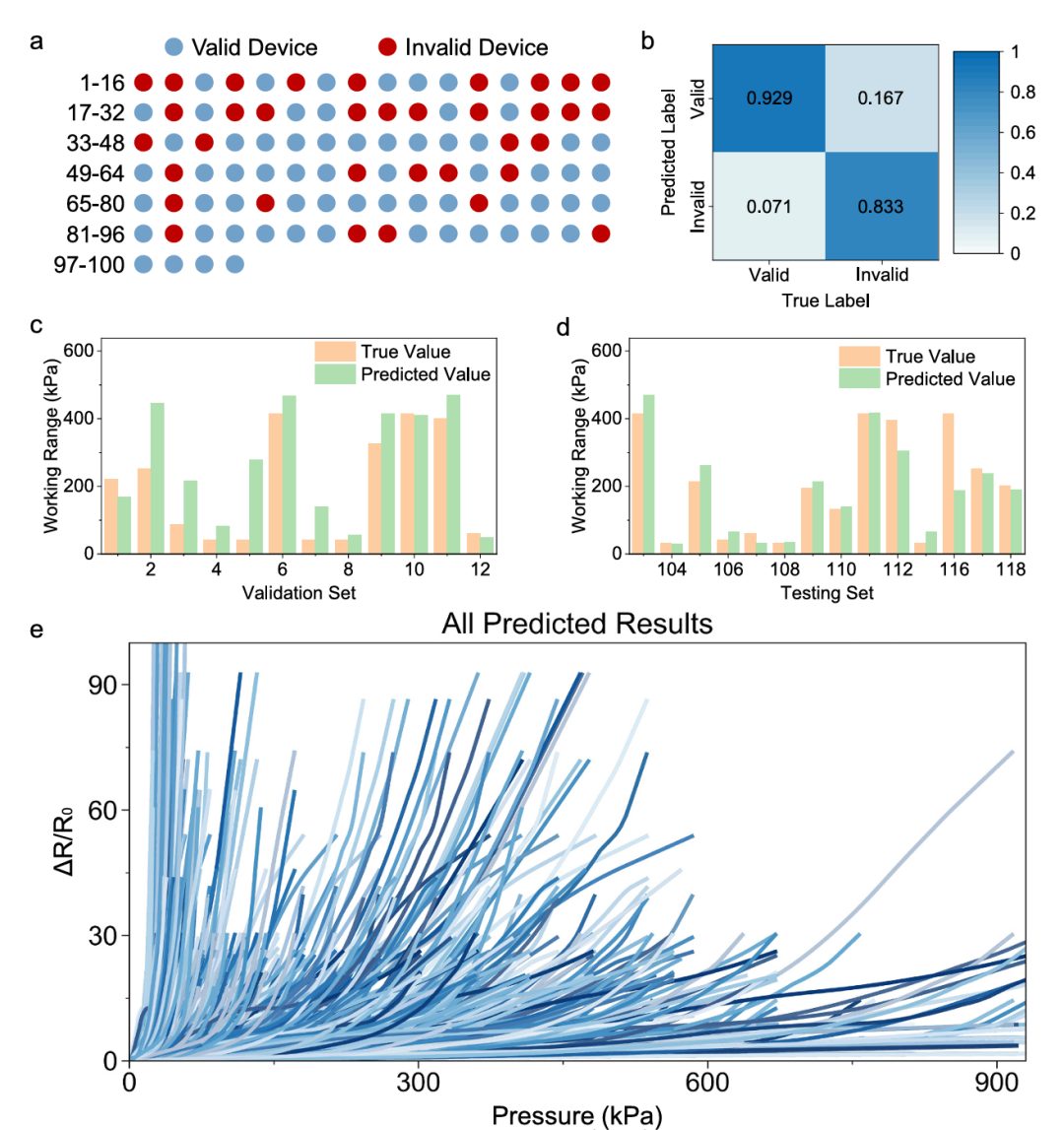
图4. 分类与预测模型测试结果。a. 训练集中100个器件的工作状态分布(65个有效器件与35个无效器件)。b. 可行性分类器在测试集上的混淆矩阵,准确率达90%。c. 12个验证集器件与14个功能测试集器件(d)的量程预测结果与真实检测极限对比。
e. 参数域内全部器件的响应曲线预测结果。
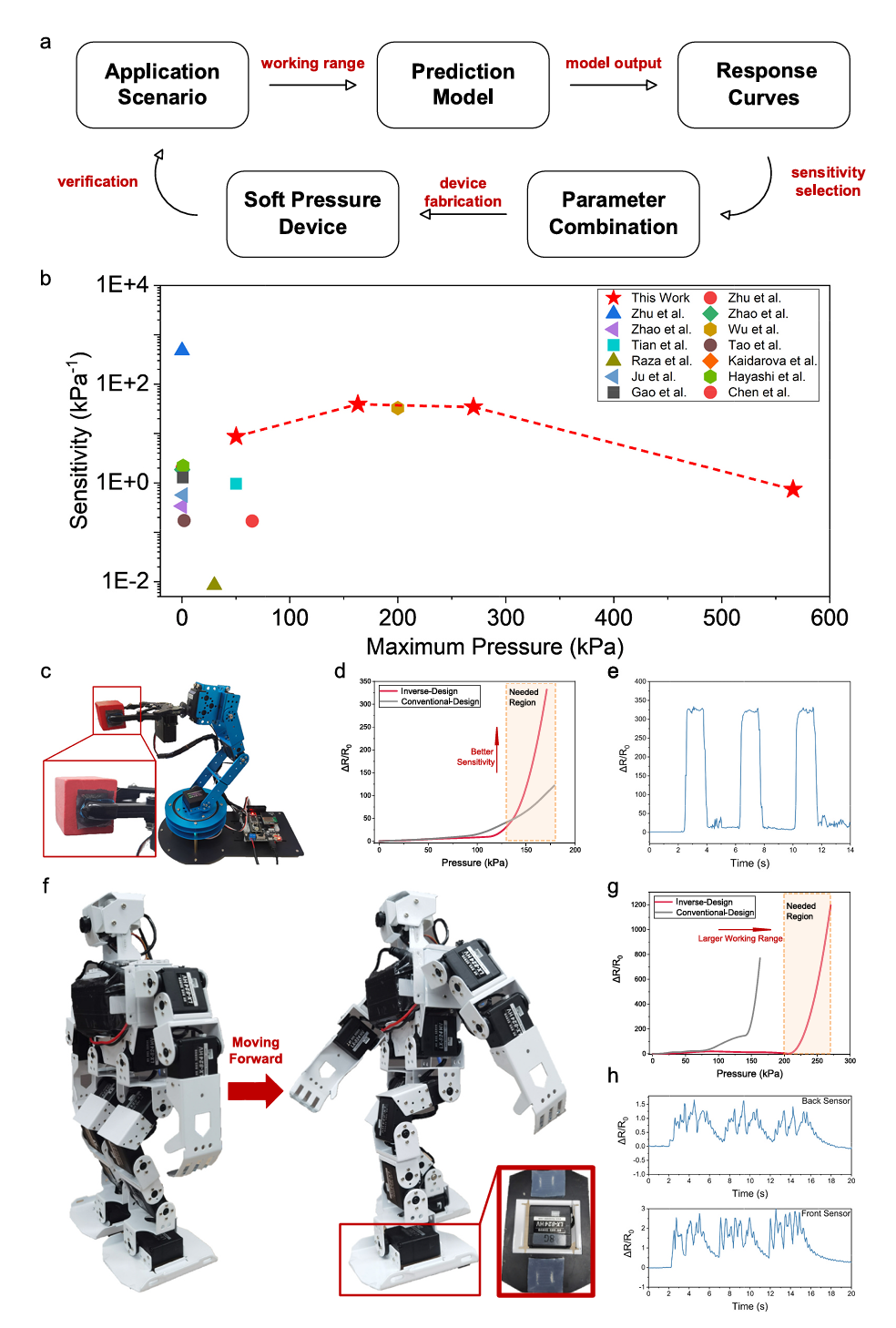
图5. 机器学习驱动设计策略在机器人领域的应用。a. 柔性压力传感器的机器学习驱动设计流程示意图。b. 通过本设计策略制备的器件与其他激光直写石墨烯/激光诱导石墨烯柔性压力传感器在灵敏度与最大检测压力方面的性能对比。c. 面向机械臂抓取任务的柔性压力传感器机器学习驱动设计方案。两只传感器贴附于夹爪指尖部位。d. 传统正向设计与逆向设计所制备器件的性能对比。设定目标工作压力范围约155 kPa,逆向设计器件表现出更优的灵敏度。e. 包含三个循环(抓持2秒/松开2秒)的抓取过程实时响应曲线。f. 面向仿人机器人足部姿态识别任务的柔性压力传感器机器学习驱动设计方案。机器人前行时,两只传感器分别置于足底前部与后部。g. 传统正向设计与逆向设计所制备器件的性能对比。设定目标工作压力范围约230 kPa,逆向设计器件可承受更大压力载荷,满足应用需求。h. 机器人前进过程的实时响应曲线。任务包含三个循环,每个循环由三个行进步伐组成。两条响应曲线的差异揭示了机器人行进时足部的应力分布情况。
结论与展望
本研究提出了一种基于三阶段机器学习模型的柔性压力传感器设计策略,旨在通过优化六个制造参数,使器件在所需工作压力范围内实现六维最优性能,并满足人体与机器人监测等不同应用需求。通过主动学习方法构建数据集,该方法从边界向中心遍历参数域,实现了对45000个参数点的全域覆盖。共制备120个器件,其中100个作为训练集,20个作为测试集。基于极端树模型构建了三阶段机器学习模型(包括可行性分类器、量程预测器和性能预测器),用于器件性能预测。器件工作状态预测准确率达90%,压力工作范围预测模型与器件性能预测模型的平均相对误差分别为28.42%和22.06%。在该策略指导下,单次制备即获得不同量程的传感器,在已报道的激光直写/诱导石墨烯器件中创造了最高检测极限记录并保持优异灵敏度。进一步地,本策略成功应用于机器人夹爪抓取监测(较小工作压力)与仿人机器人足部姿态识别(较大工作压力)的柔性压力传感器设计验证。
研究指出,关于局限性与未来展望:当前机器学习驱动设计方法仅在六参数制造域的单一体构架内实施,模型受限于特定平台与维度约束。虽然已系统验证传感器的关键参数,但针对不同器件结构和需要更高维度描述的复杂工艺堆叠的广泛验证仍需推进。作为一种具有前景的全局优化设计方法,未来研究将把预测模型适配至更多器件构型,并扩展数据集以实现多场景迁移,最终形成全面覆盖的实验指导体系。
文献信息
Yuhan Zhao, Zhanfeng Guo, Zetian Zhao, Hengbin Ding, Xiaoshi Li, Yihan Xu, Daixuan Wu, Zhongheng Sun, Yifan Li, Jiaming Li, Ruolan Zhao, Minghao Wang, Wang Wei Lee, Xiangshun Geng, Tian-Ling Ren, He Tian, Machine learning-driven design for globally optimal performance of flexible pressure sensors, Chemical Engineering Journal, Volume 526, 2025, 171046.
文献链接:https://doi.org/10.1016/j.cej.2025.171046.
上海昂维科
技有限公司现提供二维材料单晶和薄膜等耗材,器件和光刻掩膜版定制等微纳加工服务,以及各种测试分析,欢迎各位老师和同
学咨询,竭诚做好每一份服务。







