几个月前,机器人研发公司Agility Robotics公布了一段概念视频,视频中展示了公司旗下人形机器人Digit搬运货物,并在不同路面上平稳行走的场景。这款机器人优雅的步姿配合轻快的音乐,场景梦幻感十足。但是对于人形机器人,仅满足于步态的优雅与稳定是远远不够的,还需要实现某些功能才能保证机器人进入使用阶段。
过去的几个月中,Agility Robotics对原型机Digit进行了改进和升级。近日,该公司公布了Digit机器人的最新版本-Digit v2的视频,让我们先睹为快。
(Digit v2介绍视频)
这次的视频中,Digit v2拾取桌子上的纸盒,并携带纸盒行走了一段距离后,将其平稳地放置在另一张桌上,全程噪音非常小。惊喜的是,Digit v2在行进的过程中经过了原型机Digit,提供给爱好者一个直观对比的机会。我们也因此发现了几处较为明显的改动和升级:
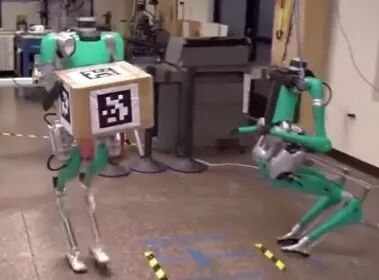
首先,v2使用了视觉识别技术确定纸箱的位置,这是机器人自主性的体现;
其次,Digit v2相比于原型机Digit,脚的面积明显增大,这有助于提高机器人行走的稳定性,也可以降低噪音;
进一步,为了可以进行拾取操作,v2改进了手臂的前臂,使其前臂通过内壁面与物体面接触的方式实现稳定夹持;
当然,为了满足负重的目标,v2手臂的上臂也比Digit粗壮许多,犹如发达的肌肉。Agility Robotics的首席执行官Damion Shelton也对视频中表达的信息作出了解读。
“v2对足部进行了优化设计,增加了横滚自由度,使得Digit可以在不进行侧向踩踏的条件下抵抗侧向力冲击,甚至可以实现单脚的静态平衡,这是digit和cassie不具备的能力。同时,增大了足底的面积,提高了在柔软表面行走的性能。
Digit v2升级了感知系统,包括用于视觉识别的英特尔摄像头以及激光雷达。通过感知系统,v2可以实现障碍物的检测以及物体拾取和放置。值得一提的是,视频中的一系列运动中,识别、拾取和放置盒子,脚步规划与躯体平衡都是完全自主的,只有路径引导和障碍规避是遥控操作的。“这是一个自主功能性的重大升级。当然,感知系统还可以应用于其他方面,我们将会在接下来的几周内展示这些强大的功能。”研究人员称。
同时,Digit v2还具有许多功能并未在视频中展现。比如,电源的接通和断开对用户更加友好。Digit v2可以在五分钟内被拆解成手提包大小的物件,便于携带。电池也可以轻松充电。
说到双足机器人,我们就难免要与Boston Dynamics的殿堂级机器人Atlas进行对比了。经过几年间的开发,Atlas已经能轻松的完成跑步、跳跃、越障等高难度动作,堪称双足机器人中的“极限运动家”。但是,倘若要作为仓储的搬运机器人,这些运动能力可谓是非必要条件,甚至其运动的噪声和150斤的体重会对使用产生困扰。
Atlas
正是面向轻量化机器人的需求,Digit应运而生。此次更新给我们带来了新的内容,也让我们对风度翩翩的Digit走向生活充满期待。当然,更新不会停止,Agility Robotics官网显示他们预计在本年度发布一组Digit的模拟器,机器人爱好者们可以奔走相告,一探究竟啦。同时,他们也表示将在2020年推出Digit v3,不知还会有哪些突破。

当然,尽管Atlas与Digit功能都十分强大,但距离实用化还存在一定差距。不过也许就在不久的将来,我们就可以看到Digit迈着优雅的步伐,手持货物走到我们身边,说出“HELLO sir! That’s you package!”
为更好的服务于广大粉丝,提供更优质全面的机器人行业内容,现机器人大讲堂微信公众号面向粉丝招聘内容编辑一职,具体要求如下:
工作内容:
关注机器人领域前沿科技、行业动态和热点事件,负责机器人大讲堂原创内容生产、热点事件深度报道、行业专家企业家深度采访等。
岗位要求:
1、有工科背景或从事工科编辑背景,机器人方向优先;
2、文字功底较好,有新媒体编辑思维,具有一定英语翻译能力,对视频剪辑有一定的基础;
3、具有创业精神和责任心,沟通能力强,踏实肯干;
4、如应届生需毕业于知名重点大学。
薪酬待遇:
不低于行业标准的薪酬福利
五险一金+补贴
与国内外一线大咖、行业翘楚面对面交流的机会
简历投递:
投递邮箱:670749331@qq.com
联系电话:15600089673
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!








