译者:张雨佳
人们很难真正通过数学理解东西,你只需要去习惯并使用它。
——约翰·冯·诺伊曼
在机器学习中,我们已经习惯了使用梯度下降法解决问题,以至于没人去质疑它为什么有效。
大家经常将梯度下降法模拟为爬山:要想找到崎岖地形中的顶峰(或低谷),就必须先观察陡坡上升(或下降)的方向,并向那里迈出一步。这个方向就被定义为梯度,沿着梯度找到局部极值的迭代过程称为梯度上升或梯度下降。上升用来寻找顶峰,下降用来寻找低谷。
但这并不是精确的数学解释。有许多问题都没有得到解答,我们也不清楚算法到底为什么有效。
如果不准确理解梯度下降法的真正原理,我们只能盲目地去使用它。而这篇文章的目的就是介绍一个合适的数学框架,帮助你理解其背后的具体操作。在你真正理解梯度下降法后,就可以有目的地提高它在项目中的性能。
本文将从以下几方面具体介绍:
1)用微分表示变化率
2)一阶和二阶导数的优化原理
3)微分方程的基础知识
4)梯度下降等价于向平衡状态流动的物理系统
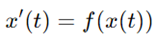
导数及其含义
首先需要了解的是导数,根据定义,如果函数 在 处可导,就要保证下式存在。

称 为导数。尽管这个定义看似随意,但它背后具有深刻的含义:可以将变化率看作为导数。
为导数。尽管这个定义看似随意,但它背后具有深刻的含义:可以将变化率看作为导数。
将导数作为速度
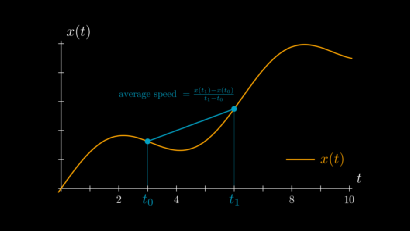
让我们将目光转回到几百年前。最初,导数的出现是为了描述物体的移动速度。简单起见,假设物体沿着直线运动,t时刻的物体位置由函数 给出,如下图所示。
我们的目标是计算物体在特定时间的速度。在高中时,我们学到:
将其转换为定量形式,如果 是两个任意时间点,且 ,则平均速度为:

我们将上述公式叫做微分系数。当物体向后移动时,平均速度就为负。
平均速度可以通过简单的几何方式解释。如果你将物体的运动近似成以平均速度行动的匀速运动,那么物体在相同时间会处于同一位置。在图中表示, 和 间连线的斜率就等价于平均速度。
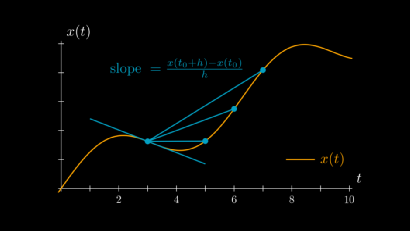
基于上述原理,我们可以进一步计算出在单个时间点 的准确速度。其思想很简单:随着时间间隔 的减小,那在 到 之间的平均速度就应该越来越趋近于 时刻的速度(Δt也可以为负)。
因此,

从几何上看,导数就是 点的切线,而微分系数则是图中连接 和 之间直线的斜率。
局部极值及其导数
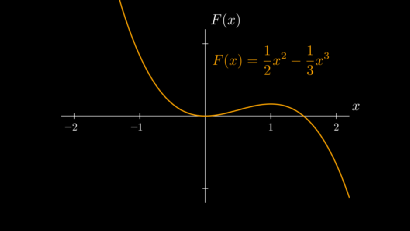
导数比速度具有更多的含义。根据上文介绍,我们知道导数等于切线的斜率。那我们再看一下下面这张图。
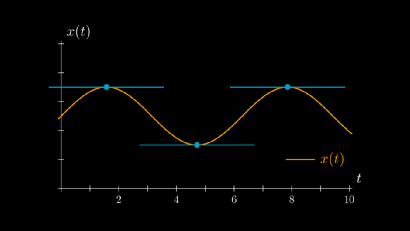
可以看到,切线在局部极小值和极大值时都是完全水平的。用数学术语来说,此时 ,那我们能利用这个性质找到函数的极小值和极大值吗?
答案是肯定的,但没那么简单。例如对于函数 ,当t为0时的导数也为零,但此处既不是局部极小值,也不是局部极大值。此时我们能做的就是继续计算其二阶导数,希望它能给出一些清晰的信息。经过验证,有以下定理。
定理:设 是一个在任意 处都二阶可导的任意函数。
(a)如果 且 ,那么a就处于局部极小值。
(b)如果 且 ,那么a就处于局部极大值。
为什么我们要关注这些导数问题?因为大部分机器学习是一个大型的优化问题。构造一个包含大量参数的模型,然后找到一组可以使其性能最大化的参数。这个寻优过程就是通过著名的梯度下降算法完成的,它看起来和我们计算的二阶导数结果没有任何关系。但事实恰恰相反:梯度下降法的核心包括了局部极值、一阶和二阶导数的关系。
下面,我们将介绍其中的原因。
什么是微分方程
方程在数学中起着至关重要的作用,其背后具有深刻的原理。通常,方程是对系统的建模,比如生物化学网络中的相互作用、经济变化过程和许多其他系统。例如,对生物体内的代谢过程进行建模就会得到下面的线性方程:

其中向量x和b代表分子的浓度(其中x是未知数),矩阵A代表它们之间的相互作用。我们学过一些线性方程的知识,所以很容易对方程进行求解。
但由于这些方程缺少时间变量,因此不适合模拟动态系统。比如我们想要建立描述空间站绕地球运行轨迹的模型,就必须使用函数及其导数方法。
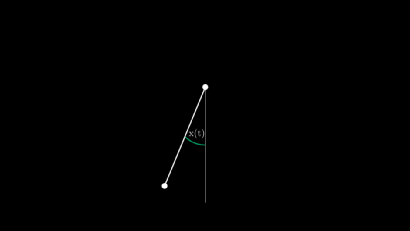
例如,摆动钟摆的轨迹可以用下面的等式描述:
其中,
是描述钟摆与垂直方向的角度,L是挂有质量为m物体的(无质量)杆长度,g是重力加速度常数,约为9.7m/s2。
根据导数的原始定义,如果 描述了钟摆在时间t时的运动,那么 和 就是对时间t的微分,用于描述物体的速度和加速度。实际上,微分方程 的解是牛顿第二运动定律。
涉及函数及其对应导数的方程称为常微分方程(ordinary differential equations),或简称为ODEs,如上面的钟摆摆动方程。毫不夸张地说,自17世纪以来,对常微分方程的研究大大推动了数学领域的发展。我认为微分方程是数学中最美的东西之一,并且梯度下降算法实际上就是微分方程的近似解。
这篇文章的第一部分是对微分方程的快速入门,将主要围绕Steven Strogatz写的书《Nonlinear Dynamics and Chaos(非线性动力学和混沌)》展开介绍。
常微分方程的一般形式
让我们直接通过示例,从微分方程中最难的地方开始学习。最简单的微分方程是下面的等式:
其中,微分是对时间变量t进行的。如果 是细菌菌落的数量,则上述方程描述了无限增长的菌落数量的动态变化。 代表菌落增长的速度:如果没有空间和营养的限制,每一个细菌细胞都可以在任何时候自由复制与分裂,并依据菌落的数量进行生长。
简单来说,上述方程的解为导数是自身的函数。通过计算,我们可以得到一组解: ,其中 是任意常数(因为我们学过,初等函数et的导数就是它本身)。
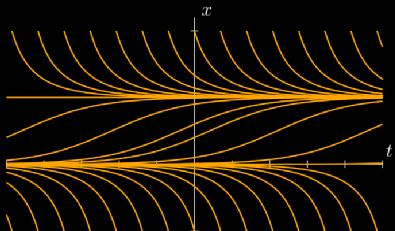
如下图所示是方程的一组解。
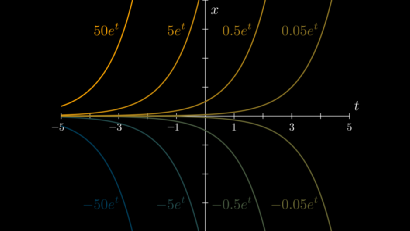
我们要记住两个知识点:一是微分方程描述了随时间变化的动态过程,二是方程可以有多个解。每个解由两个因素决定:一是方程本身,二是初始条件 。如果我们设定了初始条件,则c的值可以由下式计算得出:

因此,常微分方程有一组解,每个解都由初始条件决定。所以,我们应该用更一般的术语来讨论微分方程。
定理:(一阶常微分方程)设 为可导函数,则称方程式:
 为一阶齐次常微分方程。
为一阶齐次常微分方程。
当定义较清晰时,可以省略对t的依赖关系,将上式简写为 。
术语“一阶齐次常微分方程(first-order homogeneous ordinary differential equation)”包含了过多复杂、难理解的定语。下面将其拆解开,逐个进行分析。
微分方程是一个包含导数的函数方程。由于唯一的变量就是时间t,因此微分方程是“ordinary”的,与涉及多变量函数和偏导数的微分方程相反。由于只存在一阶导数,因此称为“first-order”。以此类推,“second-order”就会包括二阶导数。最后,由于等式右边的 并不明确依赖于时间变量t,所以该方程在时间上是“homogeneous”的。“homogeneous(齐次)”意味着动态系统的规则不会随时间而发生改变。
不要被 的复杂形式所吓到。例如在等式 中,f的作用是投影到恒等函数 上。一般来说,
是对 (可以是位置、密度等函数)及其导数,也就是变化率之间建立对应关系。
正如上述介绍的,我们可以根据微分方程和初始条件来得出函数的解。下面将其转换为恰当的数学定义。
定理:(初值问题)设 是一阶齐次常微分方程,且 为任意数,则称系统:
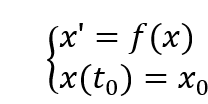
为初值问题。
如果函数 满足上述两个条件,就说它是初值问题的解。
通常,我们有选择时间原点t0的自由,一般令t0为0。
但是事情并不像看起来这么简单,微分方程和初值问题通常很难解决。除了一些简单情况,我们很难找到方程的精确解。在这种情况下,我们有两种解决方式:一是通过数值方法构造近似解,二是求助于定性方法去研究解的行为,而不直接进行求解。
我们首先讨论定性方法,将从几何的角度来深入了解微分方程是如何工作的。
微分方程的几何解释
当我们寻找不到方程的可行解时,可以转而去关注其短期和长期行为,寻找解的定性理解,而不单单盯着公式。
当给定一个微分方程如下:
并且你对特定时刻如t0时初值为 的解感兴趣。例如,你可能正在研究细菌群落的动态变化情况,并希望构建一个预测模型来拟合最新的观测值 。那么你如何快速找到模型的解呢?
可以看出,如果 且 ,那么常数函数 就是模型的一个解!这种解叫做平衡解(equilibrium solution),它正式的数学定义如下。
定理:(平衡解)令为一阶齐次常微分方程,且 为任意数。如果有 ,那么 被称为方程 的平衡点。
对于平衡点,常数函数 是方程 的解,并且是平衡解。
回到最初的例子,对于最简单的常微分方程 。我们可以将这个方程理解为理想条件下无限制的种群增长模型。只有当 且在x=0时,函数值为零,所以常数函数 是方程的解。这可以解释为:如果一个种群初始时有0个个体,那么它的规模不会发生变化。换句话说,系统处于平衡状态。
就像一个停止摆动并在最底部处于静止的钟摆。不过钟摆有两个平衡点:一个在顶部,一个在底部,我们假设物体由一根无质量的杆支撑。你可以推动底部悬挂的物体,经过一段时间后它会回到静止状态。但在顶部,任何微小的推动都会破坏平衡状态,并且再也不会回到该状态。
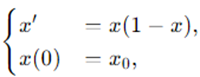
为了解释这一现象,我们可以看下面这个例子:著名的逻辑(logistic)方程

从种群动态变化的角度来看,如果方程
描述了细菌菌落的无限制生长,逻辑方程则模拟了在资源有限制下的种群生长。我们假设1是种群的总容量,那当种群数量接近这个极限值时,就会限制种群的增长速度。因此,可以将种群的变化率 建模为
,其中 项会随着种群数量接近总容量而减慢增长。
我们可以通过 的映射关系,写出逻辑方程的一般形式 。你还记得导数和单调性的关系吗?微分方程 揭示了解的变化过程,具体来说:
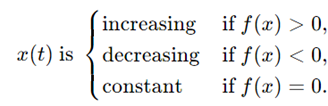
我们可以在相位图中将其可视化:
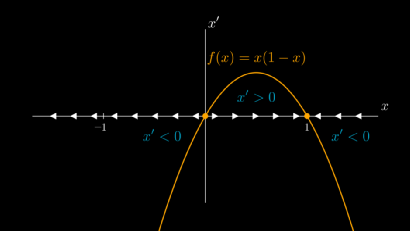
可以看出,单调性会描述方程的长期行为:
通过很少的计算量,我们可以得出方程的解为:
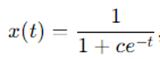
其中 是任意常数。当c=1时,方程就是常用的Sigmoid函数。你可以手动验证这个解的合理性,还可以将其绘制到图中,如下所示:
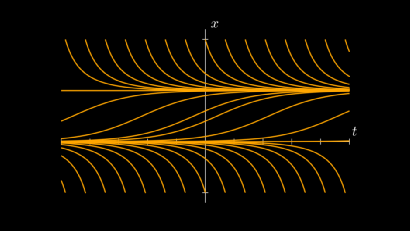
可以看出,解的单调性和我们预测的一样。
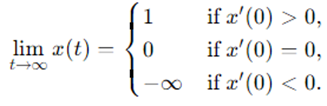
我们可以根据解的长期行为来预测平衡点(在逻辑方程中,平衡点是0和1)的特征。这可以与函数f的短期行为进行联系:如果f的值在平衡点 附近减小,那它会趋近于附近可行的解。但如果f的值在 附近增加,则会远离附近的解。
这就产生了稳定和不稳定平衡的概念。
定理:(稳定和不稳定平衡)令 是一阶齐次常微分方程,并且f是可微的, 是方程的一个平衡点。
如果对于所有 都在平衡点 的邻域 附近,那初值问题的解
会向 汇聚,即 。如果 处不稳定,就叫不稳定平衡。
在逻辑常微分方程 中, 是稳定平衡, 则是不稳定平衡。从种群数量的动态变化方面进行解释:平衡点 表示数量达到最大容量,如果种群数量大于容量1,则一些样本会因饥饿而死亡。而当种群数量略小于1时,数量就会继续增长以达到容量限制。另一方面,无论种群数量有多小,在理想情况下都不会灭绝。
连续情况下的梯度上升
现在讲回函数 的最大化问题。假设F是二阶可导的,用 来表示其导数。那么,我们可以通过计算F的二阶导数来得到局部极大值,寻找符合 且
的 。
这是不是很眼熟,如果 也成立,那么 就是方程的平衡解。并且由于 ,它会趋近附近可行的解。这意味着如果 是符合上述条件的,那 就是以下初值问题的解。
即 。换句话说,解会向 处收敛,也就是函数F的局部极大值处!这就是连续情况下的梯度上升方法。
这看起来很容易实现,但实际上还存在很多问题。因为大部分的微分方程都很难求解,我们很难找到求解函数F的方向。幸运的是,我们可以用近似方法去逼近解。
作为离散微分方程的梯度上升
实际计算导数时,通常将前向之差在数值上近似为导数:
如果 确实是对应初值问题的解,那就太幸运了!但大部分情况下,我们将前向差分代入微分方程中,从0向前迈出一小步,进而逼近 。用数学表达式实现:
从而得到:

并定义 和 为:
并且 会约等于
。这看起来是梯度上升的第一步,之后再次使用前向差分,这次从点 开始逼近,得到如下公式:
通过定义,我们知道 ,那么联立上式可以得到 约等于 。不过在 中会积累两种近似误差:首先是前向差,然后是前一步的近似误差。
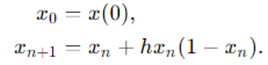
这种方式会引导我们去定义递归序列:
正如公式中所暗示的,我们同样可以用 去近似 。这个递归序列本身就是梯度上升算法,小步长h相当于学习率!这同样也是微分方程中的欧拉(Euler)算法。
如果我们不深究具体细节,当h足够小,并且预测到的函数f的行为是正确的,那么就可以使用欧拉算法收敛到平衡解 。
现在就剩最后一步了:将梯度上升转换为梯度下降。实际操作非常简单,梯度下降就是对-f函数应用梯度上升。因为最小化函数f与最大化-f的结果是一样的。最终,我们实现了著名的梯度下降算法,它是动态系统向稳定平衡处收敛的结果。
梯度上升的运作方式
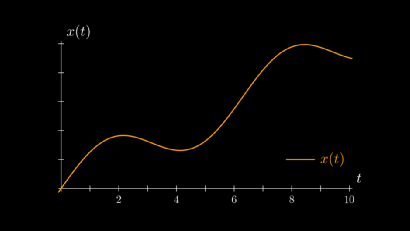
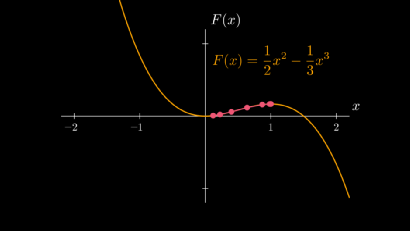
为了明确梯度上升(即欧拉算法)的具体作用,我们回到最初的逻辑方程 中。假设我们想找到下面函数的局部极大值:
其曲线如下图所示:
首先,我们可以利用所学知识,通过计算其导数 ,得出在 时是局部极大值。当然,你最好自己拿笔验证一遍。
由于 且 ,因此点 是下式逻辑方程的稳定平衡点。
因此,如果初值 足够接近 ,那初值问题的解 为:
且 。实际上,无论我们选择无穷区间 中任意时刻的初始值 ,最终都会收敛到该处。将欧拉方法离散化表示,就能得到如下的递归序列:
我们将通过欧拉算法求解 的可视化结果展示如下。为了便于观察,初始值设为t0=-5。
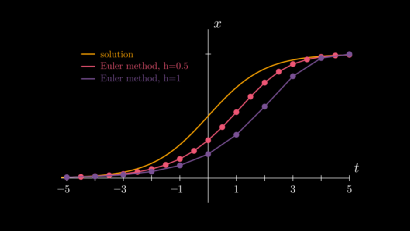
我们还可以把欧拉算法得到的离散解,画在 图上。
结论
所有上文介绍到的知识,都是为了去理解梯度下降算法的原理。
梯度下降算法是机器学习中最重要的优化算法,其核心原理很简单:想要找到函数的局部极小值,就要先找到它下降的方向,然后向那里迈出一小步,这个看似朴素的想法其实蕴含了很多微分方程的基础知识。
如果我们把函数看作决定动态系统的规则,那么局部极值就对应于平衡状态。那么当用微分方程描述动态系统时,求取局部极值的过程就是逼近其平衡状态。从这个观点来看,梯度下降算法只不过是求取方程数值解的一个方法。
到目前为止,我们只研究了单变量情况下的函数,而机器学习是在数百万个维度上进行的。尽管如此,我们可以将其作为研究多变量和高维空间函数的指南。虽然研究的对象更复杂了,但他们背后的原理一样。
多变量微积分中的最大困难是处理的复杂性,不过向量和矩阵操作可以帮我们负担大部分的繁重计算。不过这是下一步要研究的东西了。

- 机器学习交流qq群955171419,加入微信群请扫码