点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
大家好,我们的社区「小六的机器人SLAM圈」星球成员对NeRF SLAM相关的最新的论文、部分代码进行了详细解读,可以说是目前最全面的解读系列了!
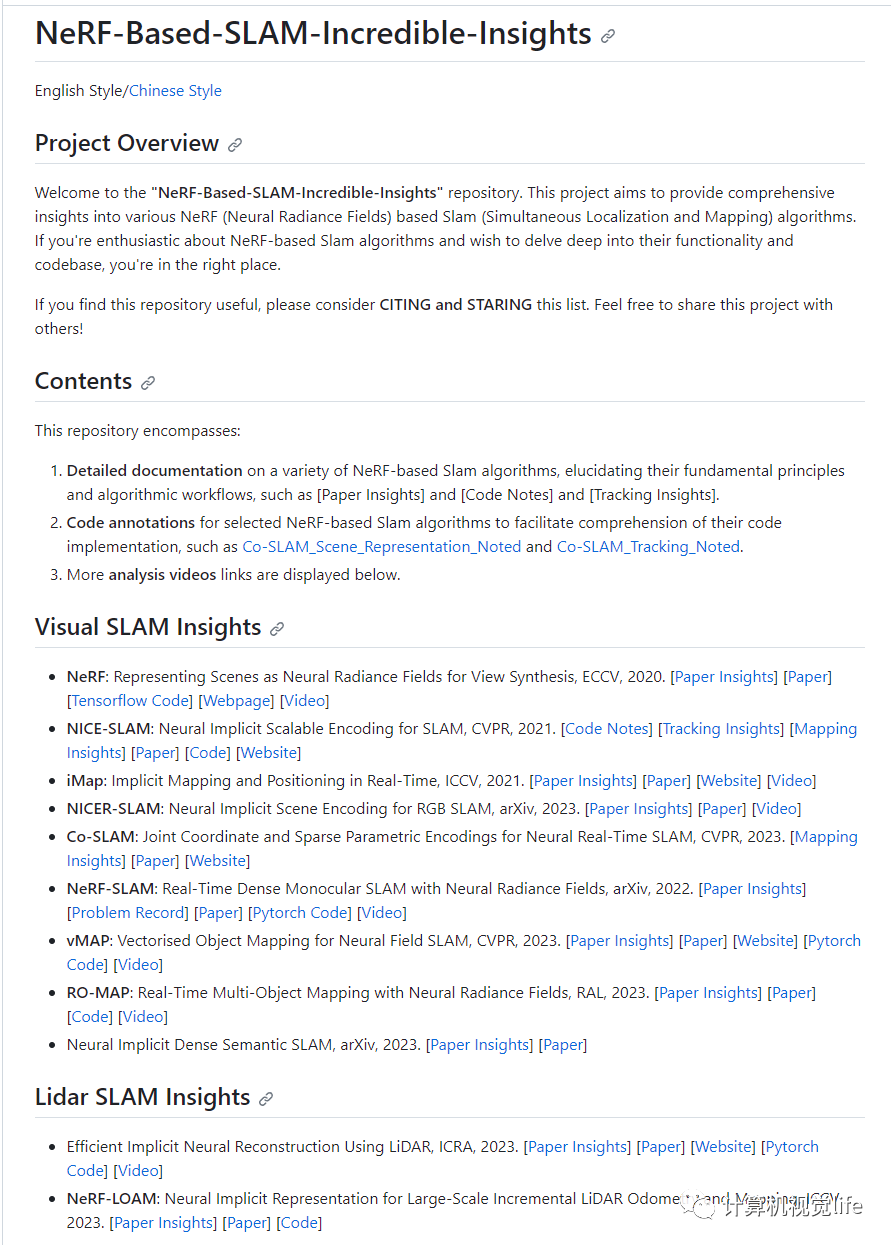
我们在GitHub里上线了repo
https://github.com/electech6/NeRF-Based-SLAM-Incredible-Insights
详细列出了该项目中涉及的所有论文,代码,项目主页链接
后续还会更新,欢迎 fork,star
根据issues反馈,还特意做了中英文双语切换,根据需要点击查看哈~
视频链接(跳转到知识星球观看)

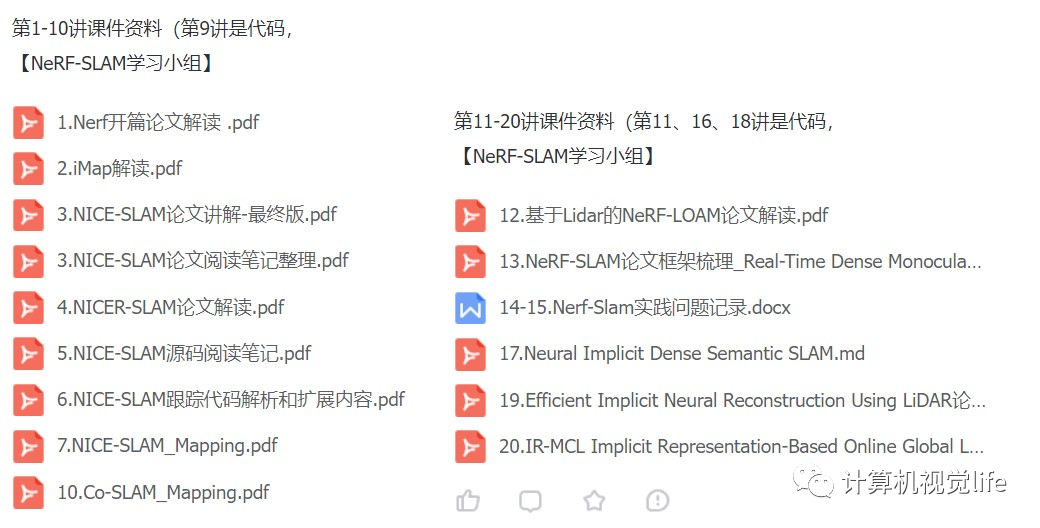
如果你已经是知识星球会员可以直接在星球里下载所有课件,学习视频
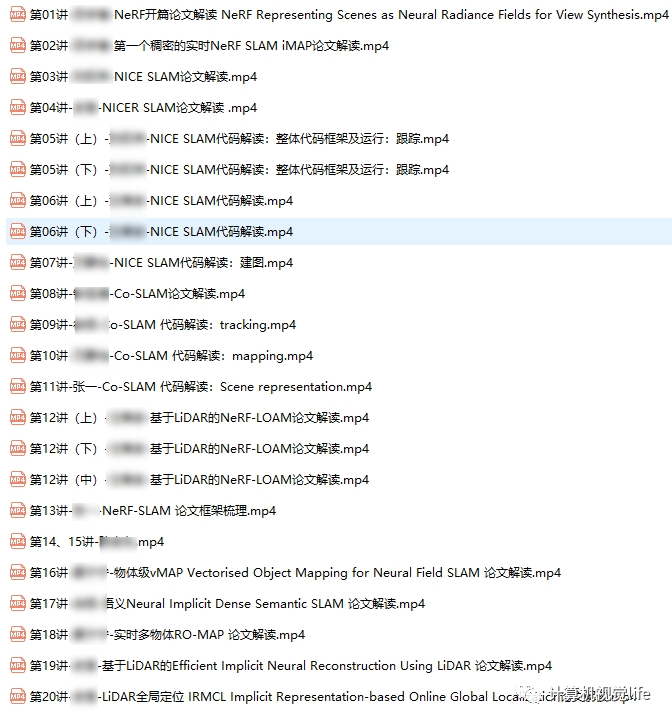
星球里也提供了丰富的课件,大家在知识星球里均可学习查看~
星球里不仅仅有NeRF相关的内容,还有一系列几十个主题的系列教学(需联系客服开通权益)
读书学习类
1、死磕视觉SLAM十四讲(22讲更新完毕)
2、一起学习书籍《机器人学中的状态估计》(16讲更新完毕)
3、一起学习书籍《多视图几何》(更新18讲)
4、《视觉惯性SLAM》挑战赛(50讲,按期学习)
优秀源码解读类
1、多传感器融合LVI-SAM 快速入门(13讲更新完毕)
2、基于livox的SLAM-LIO-Livox代码解读(8讲更新完毕)
3、FAST-LIO2源码学习(9讲更新完毕)
4、GVINS源码学习(7讲更新完毕)
5、多传感器融合R3LIVE 快速入门(7讲更新完毕)
6、视觉稠密SLAM-TANDEM 快速入门(4讲更新完毕)
7、半直接法SVO Pro代码解读(更新中)
8、多传感器标定原理及代码解读(更新中)
9、GNSS定位库RTKLIB原理及代码解读(更新中)
工具技能类
1、从零开始系统学习代码调试(10讲更新完毕)
2、从零开始系统学习G2O (8讲更新完毕)
3、从零开始系统学习Ceres solver(6讲更新完毕)
4、从零开始系统学习OpenCV(13讲更新完毕)
5、从零开始系统学习点云PCL (18讲更新完毕)
6、从零开始系统学习GTSAM(12讲更新完毕)
论文及框架类
1、语义SLAM论文一起读(7讲更新完毕)
2、深度学习SLAM论文一起读(17讲更新完毕)
3、基于NeRF的SLAM论文及代码解读(20讲更新完毕)
……
后续每天在知识星球里更新视频,还会组织其他主题的学习活动。








