点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
扫描下方二维码,加入3D视觉技术星球,星球内汇集了众多3D视觉实战问题,以及各个模块的学习资料:最新顶会论文、书籍、源码、视频(近20门系统课程[星球成员可免费学习])等。想要入门3D视觉、做项目、搞科研,就加入我们吧。

作者:泡椒味的口香糖 | 来源:3DCV
添加微信:dddvision,备注:SLAM,拉你入群。文末附行业细分群
0. 写在前面
使用深度学习提取特征点的SLAM系统已经很多了,典型工作就是GCN-SLAM和SuperPoint-SLAM。感觉深度学习特征点相较传统ORB、SIFT这类特征点,主要优势在于重复性和鲁棒性,特征点的精度明显提升。缺点就是需要GPU,模型前向推理和NMS的计算本身也非常耗时。而且深度学习特征点的泛化性很差,也很难学习旋转不变性,在大旋转变化的匹配一般都不太好,当然REKD等方案也在专门研究旋转情况。
Anyway,任何方法都有自己的优劣,都有适合的场景。今天笔者将记录在C++上部署深度学习SiLK特征(ICCV 2023)的过程,并附上代码的逐行注释。
1. SiLK论文信息
标题:SiLK -- Simple Learned Keypoints
作者机构:Pierre Gleize, et al.Meta AI
来源:ICCV 2023
论文:https://arxiv.org/abs/2304.06194
代码:https://github.com/facebookresearch/silk
2. 模型权重导出
深度学习都是在Pytorch/Tensorflow等Python框架上训练,想在C++上运行需要将模型导出为TorchScript。python环境导出模型权重的示例代码如下:
image = load_image(IMAGE_0_PATH)
model = get_model()
script_model = torch.jit.trace(model, image)
torch.jit.save(script_model, OUTPUT_MODEL)
笔者已经替大家导出好了.pt文件,如有需要可以加入3D视觉从入门到精通知识星球三天后获取!
在C++上运行.pt文件需要Libtorch环境,需要根据自己电脑的Cuda来下载对应版本,也可以下载CPU版本的Libtorch不使用GPU。直接下载到本地然后在CMakeLists.txt中定义一下路径即可,不用编译和安装。注意需要引用头文件:
#include
3. 运行代码及编译
以下是使用SiLK模型提取特征点的完整代码,包含模型加载、数据预处理、前向推导、数据转换等步骤,已经做了详细的注释。注意这里使用的SiLK特征已经将NMS过程封装到了权重文件里,读者想自己实现NMS的话可以在导出权重的时候选择一下。
#include
#include // 包含 OpenCV 库
#include // 包含 PyTorch 脚本解析器
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
if (argc != 2) { // 检查输入参数数量是否正确
cout return 1;
}
// 加载图像
Mat image = imread(argv[1], CV_LOAD_IMAGE_COLOR);
assert(image.data && "Can not load image!");
// 转换为灰度图
Mat mImGray = image.clone(); // 深拷贝避免修改原始数据
cvtColor(mImGray, mImGray, COLOR_RGB2GRAY); // 转换为灰度图像
vector keypoints; // 存储特征点
torch::jit::script::Module module = torch::jit::load("SiLK.pt", torch::kCUDA); // 加载 SiLK 模型
mImGray.convertTo(mImGray, CV_32FC1, 1.f / 255.f, 0); // 转换图像数据类型并归一化
int img_height = mImGray.rows, img_width = mImGray.cols; // 获取图像尺寸
vector dims = { 1, img_height, img_width, 1 }; // 定义张量维度
auto img_var = torch::from_blob(mImGray.data, dims, torch::kFloat32).to(torch::kCUDA); // 创建 PyTorch 张量并移动到 GPU
img_var = img_var.permute({ 0,3,1,2 }); // 调整张量维度顺序
vector<:jit::ivalue> inputs; // 存储输入参数
inputs.push_back(img_var); // 添加图像张量作为输入参数
auto output = module.forward(inputs).toTuple(); // 模型前向传播
auto pts = output->elements()[0].toTuple()->elements()[0].toTensor().to(torch::kCPU); // 获取特征点张量
auto desc = output->elements()[1].toTuple()->elements()[0].toTensor().to(torch::kCPU); // 获取特征描述子张量
cv::Mat pts_mat(cv::Size(3, pts.size(0)), CV_32FC1, pts.data_ptr<float>()); // 创建特征点矩阵
cv::Mat descriptors(desc.size(0), 128, CV_32FC1); // 创建描述子矩阵
cv::Mat Confidence(pts.size(0), 3, CV_32FC1); // 创建置信度矩阵
for (int i = 0; i keypoints.push_back(cv::KeyPoint(pts_mat.at<float>(i, 1), pts_mat.at<float>(i, 0), 1.0f)); // 将特征点添加到容器中
Confidence.at<float>(i, 2) = pts_mat.at<float>(i, 2); // 提取置信度信息
for (int j = 0; j descriptors.at<float>(i, j) = desc[i][j].item().toFloat(); // 提取描述子信息
}
drawKeypoints(image, keypoints, image, Scalar(255, 255, 0), DrawMatchesFlags::DRAW_RICH_KEYPOINTS); // 在图像上绘制特征点
imwrite("image_with_SiLK.jpg", image); // 保存带有特征点的图像
return 0;
}
代码运行的CMakeLists.txt文件如下,读者可以直接复制运行:
cmake_minimum_required(VERSION 3.0)
project(pose_recover)
# 设置C++编译标准
set(CMAKE_CXX_STANDARD 14)
# 寻找OpenCV库
find_package(OpenCV REQUIRED)
# Libtorch库
set(TORCH_PATH ${PROJECT_SOURCE_DIR}/libtorch)
set(CMAKE_PREFIX_PATH ${PROJECT_SOURCE_DIR}/libtorch)
find_package(Torch REQUIRED)
# 包含头文件目录
include_directories(${OpenCV_INCLUDE_DIRS}
${Torch_INCLUDE_DIRS})
# 添加可执行文件
add_executable(extract_point extract_point.cpp)
# 链接OpenCV库
target_link_libraries(extract_point ${OpenCV_LIBS} ${TORCH_LIBRARIES})
4. 效果展示
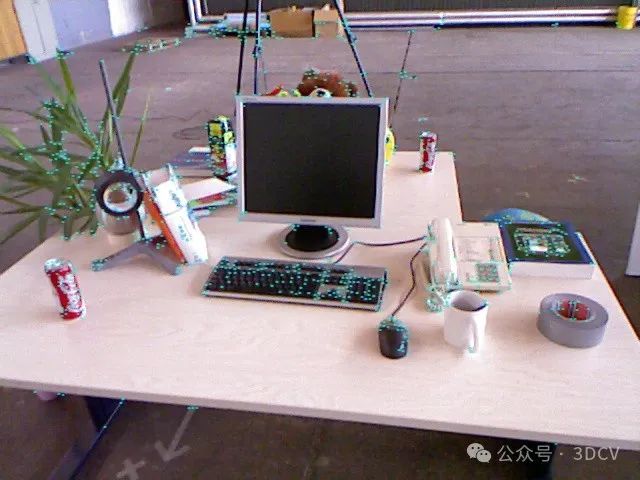
至此已完成了SiLK特征的提取,包含特征点坐标、描述子、置信度,下篇文章我们将继续讨论如何在C++中使用深度学习模型来做帧间的特征匹配。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程:
3dcver.com
3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、三维视觉C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪。
 ▲长按扫码学习3D视觉精品课程
▲长按扫码学习3D视觉精品课程3D视觉学习圈子
3D视觉从入门到精通知识星球、国内成立最早、6000+成员交流学习。包括:星球视频课程近20门(价值超6000)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。
 ▲长按扫码加入星球
▲长按扫码加入星球3D视觉交流群
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶
、三维重建、无人机等方向,细分群包括:
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
添加小助理: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。
 ▲长按扫码添加助理
▲长按扫码添加助理欢迎点个在看,你最好看!









