近年来,人形机器人引起了学术界和产业界的广泛关注。触觉感知是人形机器人与外界环境进行信息交换的核心传感技术之一,使得机器人能够实现物体识别、灵巧操作和刺激反应等类人行为。在机器人触觉应用中,物体识别和灵巧操作与物体表面形态密切相关,因此纹理识别成为一个重要的研究方向。
据麦姆斯咨询报道,近期,华中科技大学刘大彪教授等人在Interdisciplinary Materials期刊上发表了一篇题为“Recent Progress in Tactile Sensing and Machine Learning for Texture Perception in Humanoid Robotics”的综述文章,探讨了用于人形机器人纹理识别的触觉感知和机器学习的最新研究进展。该综述介绍了用于纹理识别的触觉传感器设计和工作原理,区分了基于触摸和基于滑动的两种纹理识别方法,讨论了实现纹理识别的机器学习算法,并分析了人形机器人纹理识别领域当前面临的挑战及未来发展机遇。
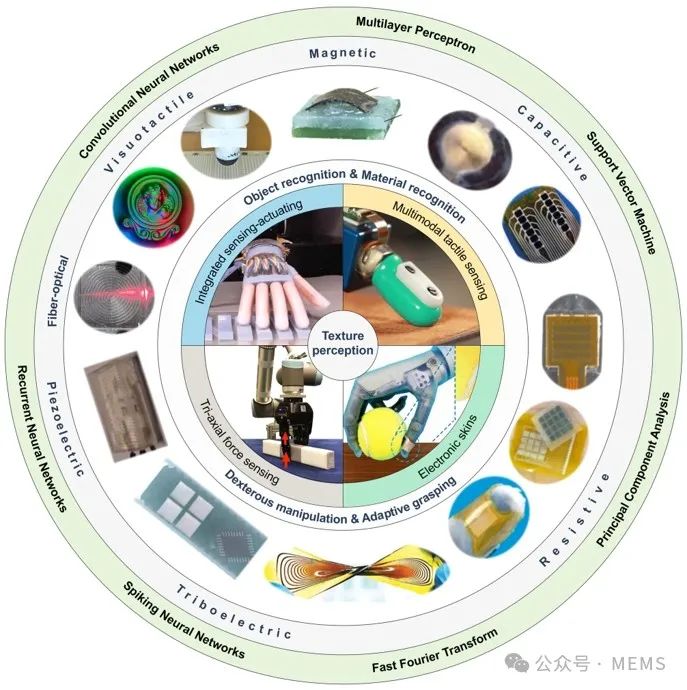
图1 人形机器人中基于触觉感知的纹理识别
一般而言,纹理识别涉及测量纹理表面的微观结构参数,或者依据物体表面纹理对不同材料进行分类。二者的关键区别在于目标是纹理参数值还是材料类型。为了实现纹理识别,人们已经开发出了多种触觉传感器,包括基于电阻式、电容式、磁式、视觉触觉式、光纤式、压电式、摩擦电式等原理的传感器。这些触觉传感器通常具有高空间分辨率或高采样率,以实现精准的纹理测量。根据机器人与物体接触的方式,触觉感知可分为基于触摸的方法和基于滑动的方法。
基于单点触摸的纹理识别
触觉传感器可以通过对物体进行单点触摸,依据压力分布或接触面积来测量纹理。当触觉传感器按压在物体表面时,纹理会导致传感器表面产生不均匀的压力分布。
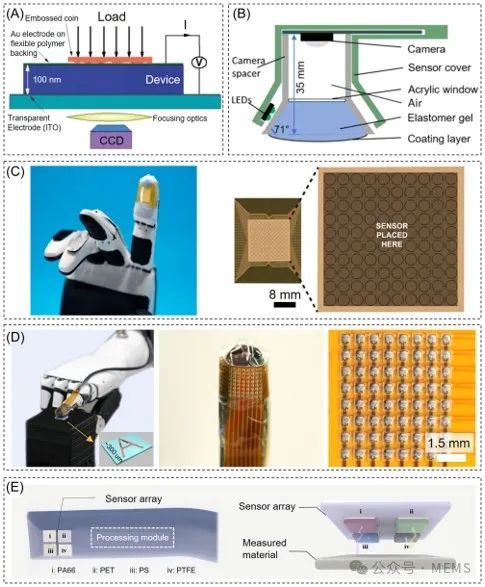
图2 基于单点触摸的纹理识别
通过单点触摸测量纹理的方法简单且直观。但是,捕捉纹理微观结构的形状特征及高度信息仍然具有一定挑战性。此外,此类方法往往局限于被按压区域的局部测量,不适用于大面积或远距离测量。
基于滑动的纹理识别
除了单点触摸之外,人形机器人还可以通过在物体上滑动指尖来感知纹理。在滑动过程中,法向力、摩擦力和振动是纹理识别需要监测的重要参数。根据所测力的类型,滑动方法可以分为四种情形:仅测量合力、仅测量法向力(或压力)、仅测量摩擦力,以及同时测量法向力和摩擦力。
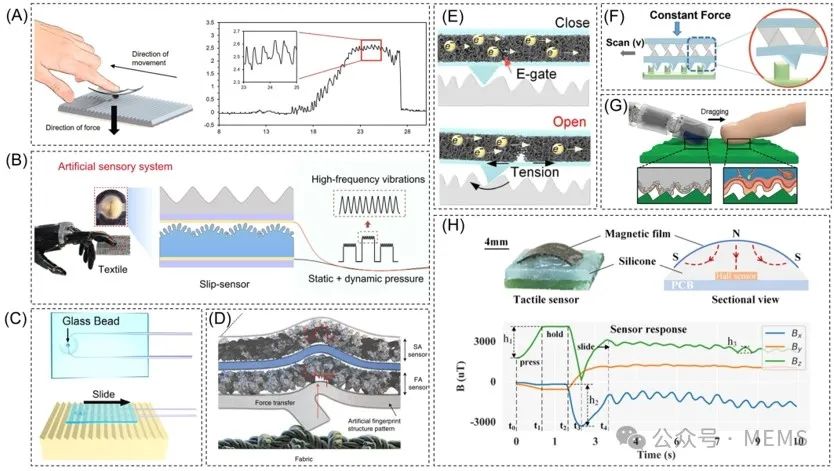
图3 基于滑动的纹理识别
为了测量更多纹理参数,通常需要对触觉传感器进行精密设计、选材和制造,使其能够输出多个信号通道。能够解耦法向力和摩擦力的触觉传感器为探索更多纹理信息提供了极具前景的解决方案。
基于触摸纹理识别的机器学习
为了计算微观结构参数,通常需要使用诸如快速傅里叶变换(FFT)和主成分分析(PCA)等统计工具处理传感信号,之后再通过理论公式或经验公式进一步分析。对于材料类型分类而言,通常会采用机器学习算法,例如多层感知器(MLP)、支持向量机(SVM)、k近邻算法(kNN),以及各类神经网络,包括卷积神经网络(CNN)、循环神经网络(RNN)等。
对于基于单点触摸的纹理识别而言,机器学习模型的输入数据,通常是呈现为压力分布映射形式的触觉图像,或者是能够展示所接触物体表面形态的相机图像。在众多机器学习算法中,CNN以其在图像分析中的优异表现而被广泛应用,通常作为纹理识别的首选算法。
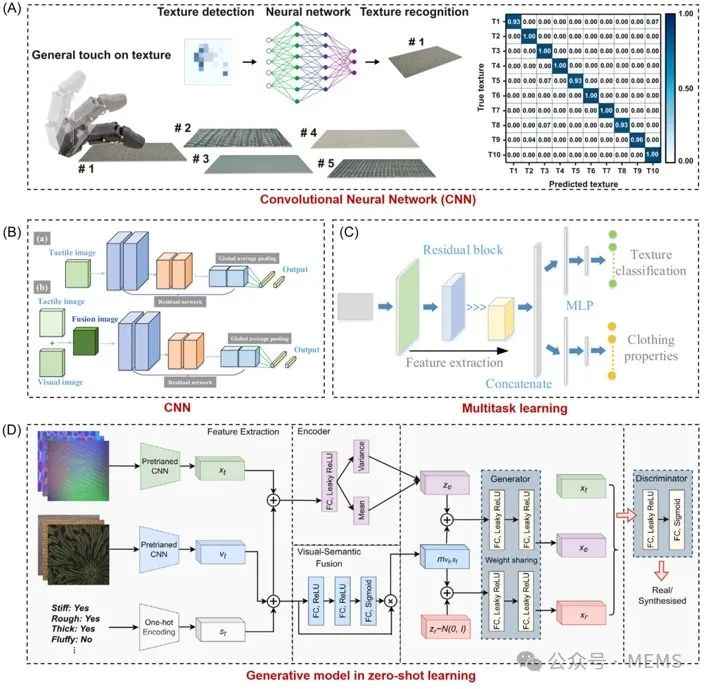
图4 基于触摸纹理识别的机器学习
大多数触觉识别方法仅限于对已触摸过并训练过的材料进行分类,无法识别未收集过触觉数据的未知材料。针对该问题,多模态零次学习算法提供了一种解决方案,该算法使用了结合变分自编码器(VAE)和生成对抗网络(GAN)的生成模型,弥补了两种模型各自的局限性,使得基于合成特征训练的分类器能够在没有先验触觉数据的情况下有效识别新材料。
基于滑动纹理识别的机器学习
当在有纹理的表面上滑动时,触觉传感器会生成时间序列数据,而非静态触觉图像。此时,分类前的关键步骤是将时间序列预处理成机器学习算法可接受的输入形式。最简单的方法是将传感信号截取为固定长度的数据序列,将其作为与时间无关的模型(例如全连接神经网络、SVM和一维CNN)的常规数据数组。
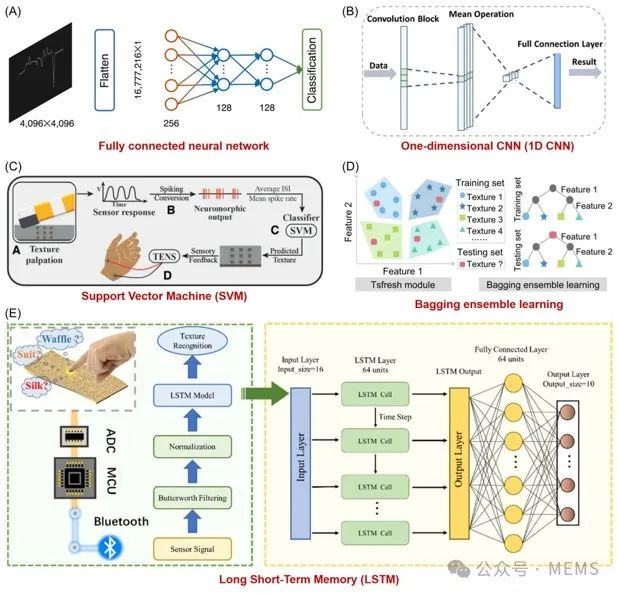
图5 基于滑动纹理识别的机器学习
然而,由于上述机器学习模型并未将时间作为特殊维度,这可能导致重要的触觉信息丢失,因为时间是单向的,在滑动过程中包含了历史线索。值得注意的是,循环神经网络(RNN)专门用于时间序列处理。例如,长短期记忆网络(LSTM)和门控循环单元(GRU)是使用触觉传感器进行纹理识别时常采用的RNN模型。LSTM的门控机制能有效处理序列数据,缓解梯度问题并提高分类准确性。
挑战与机遇
虽然人形机器人在基于触觉的纹理识别方面已经取得了显著进展,但该领域仍面临许多挑战。首先,现有的纹理识别应用主要集中在物体识别方面,针对灵巧操作的研究较少。其次,基于触觉的纹理识别主要依赖材料工程和计算技术,对底层接触力学的研究较少。第三,许多研究仅通过机器学习算法进行分类,而未对微观结构参数进行测量。虽然机器学习算法能够有效降低信号分析的复杂性,但缺乏对接触力学的理解将会限制机器人触觉感知技术的发展。因此,将接触力学、测量方法与机器学习相结合很有必要。
展望未来,触觉传感器对于开发人形机器人的前沿技术至关重要。与此同时,人形机器人对于基于触觉的纹理识别有着更为深入和迫切的需求。解决这些问题将加速仿生感知、机器人智能、电子皮肤、人机交互等新兴技术的发展,并进一步推动材料科学、实验力学、柔性电子学、人工智能等多学科的交叉融合。
论文信息:
https://doi.org/10.1002/idm2.12233












