为什么要做传感器融合?
自动驾驶是当今科技行业中的最热门话题之一,随着技术的不断进步,自动驾驶汽车将逐渐成为主流,而多传感器融合技术是实现自动驾驶技术的关键。单一传感器在应用上存在一定的局限性,比如在天气恶劣或环境复杂时,传感器的效果会受到极大影响。为了克服这些局限性,多传感器融合技术应运而生!多传感器融合技术将多个传感器的数据进行整合和处理,形成更为全面、准确的感知结果。
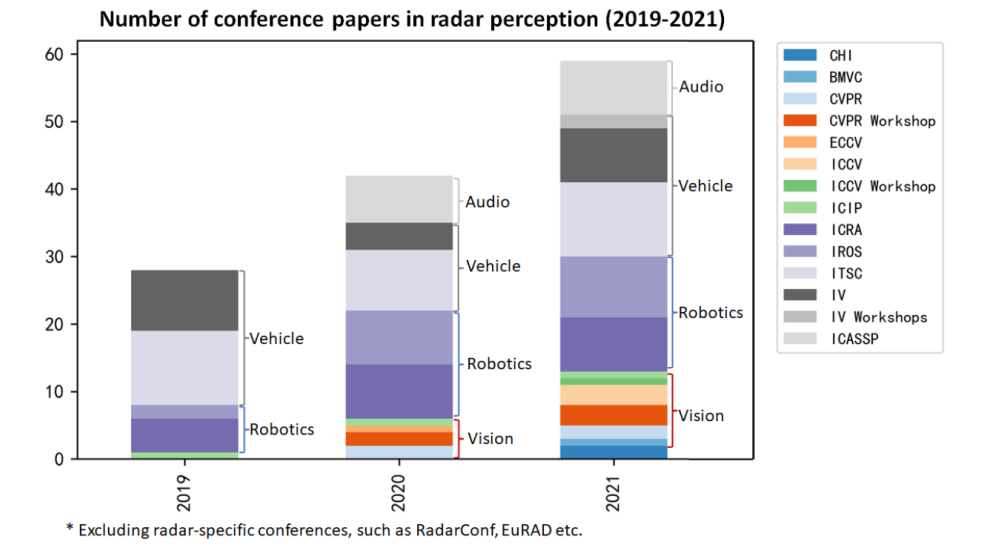
近些年来,多传感器融合的方案在各类顶级会议中逐渐受到关注,并且随着BEV感知方法的提出,给予了融合算法以更高的自由度,也就自然地成为了感知算法研究的热点之一。在工业界,多传感器融合技术已经得到了广泛的应用,Uber和Waymo等公司也在自动驾驶技术中采用了多传感器融合技术,随着未来技术的进一步发展,多传感器融合技术将得到更为广泛的应用,成为自动驾驶技术的重要推动力量。
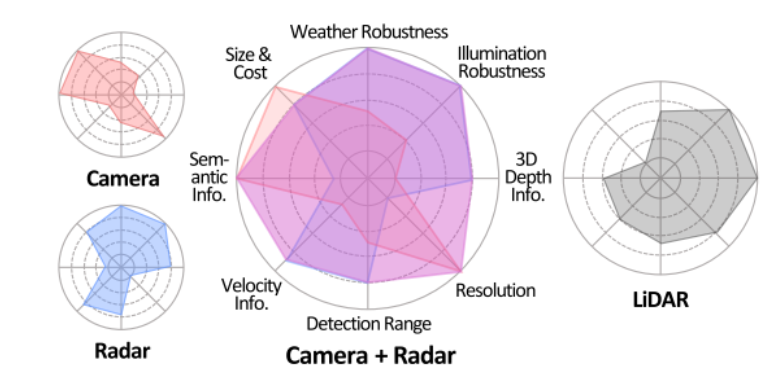
毫米波雷达和相机融合是传感器融合方案中非常受欢迎的方法,也是目前落地最多的方案!相机很容易受到光照不足或恶劣天气条件的影响,仅用相机检测三维物体无法提供准确的距离信息。毫米波雷达可以提供精确的距离信息、速度信息以及其它信息并且可以全天候地运行,但是稀疏性和噪声等致使雷达无法作为主要信息来源。综合来说,相机具有良好的分辨率和分类能力,雷达拥有准确的目标距离和速度等测量能力和对恶劣天气的鲁棒性,通过融合雷达和相机传感器能够充分发挥两者互补关系,从而在整体上提升感知能力。
雷达和相机融合具有多种融合方式。一方面,学术界流行的前融合方法,随着BEV方法的引入,给融合带来了新的契机和卷论文的方向,具有非常广阔的研究前景,但是对雷达原理和传统检测方法的认知会限制我们进一步的优化。另一方面,工业界常用的后融合方法目前资源较少,同时与前融合领域内容相差较大不易入门。一门能够兼具前、后融合内容的课程对于大家入门多传感器融合具有非常重要的意义!能够帮助许多初学者快速入门,少走弯路。自动驾驶之心团队在深入调研毫米波视觉融合常用方法后,从数据处理、聚类、跟踪匹配、深度学习点云方案、2D/3D融合等多个方向展开讲解,是一门同时面向工业界和学术界的教程!
开课前最后一天优惠!扫码加入学习!

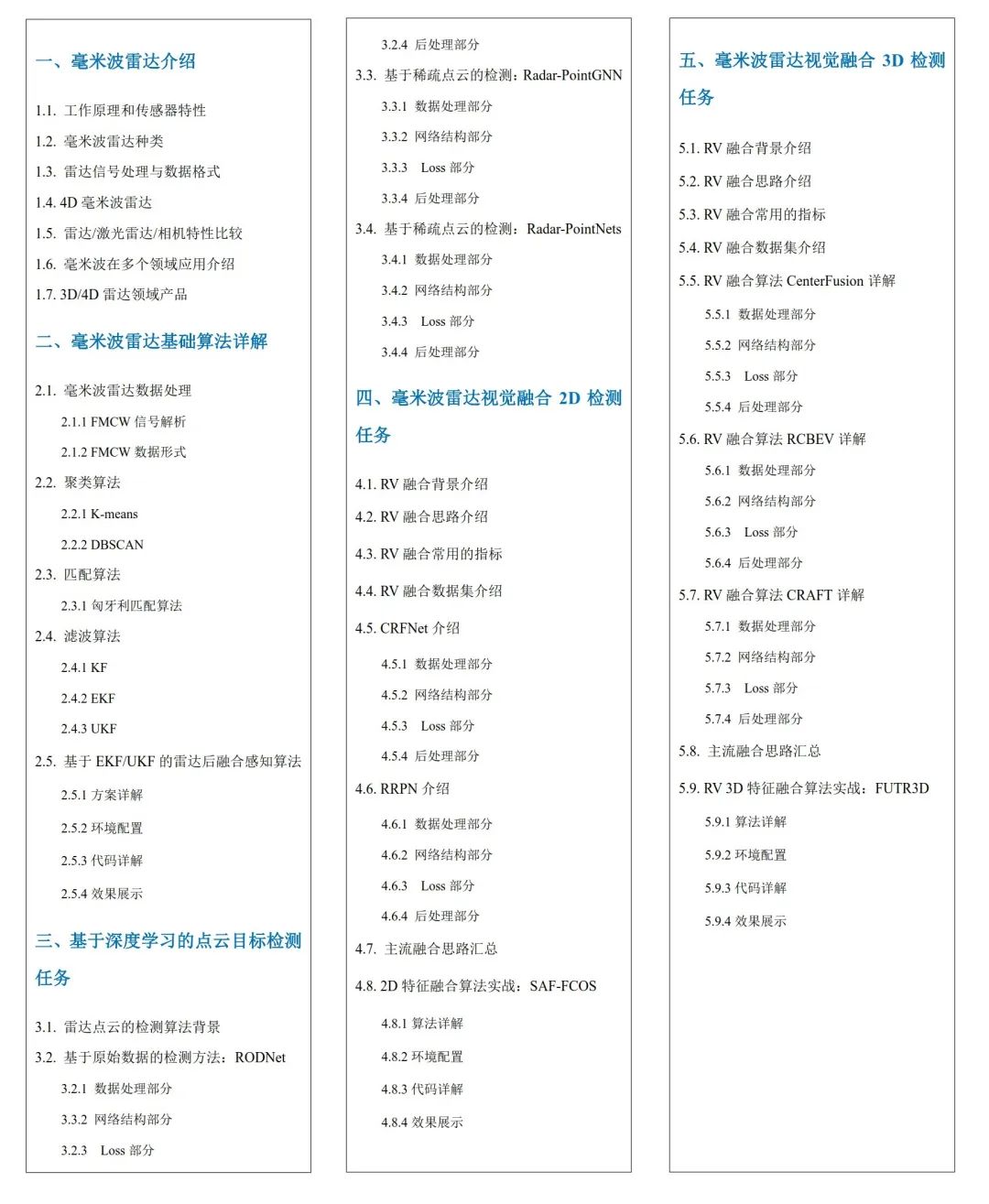
课程大纲
主讲老师
Naca,自动驾驶之心团队成员,专注于毫米波雷达和相机融合的目标检测和场景感知 !
本课程适合人群
- 计算机视觉与自动驾驶感知相关研究方向的本科/硕士;
需要具备的基础
- 具有一定的Python、PyTorch、C++基础;
- 对BEV感知算法、传统的滤波和优化算法有一定的了解;
学后收获
-
- 对毫米波视觉2D融合和3D融合方案有着较深了解,熟悉设计方法与思路;
- 对多传感器融合任务有深入了解,能够掌握工业界常用设计方法,搭建自己的工程;
开课时间
2023.6.5号正式开课,为期两个月,全程录播,随到随学,讲师交流群内答疑!
欢迎咨询










