在公众号「计算机视觉工坊」后台,回复「原论文」可获取论文pdf及支撑材料、代码链接
这里给大家推荐下SLAM微信群,扫码入群,方便大家沟通交流:

1. 笔者个人体会
现在SLAM无论在学术界还是工业界或多或少都要结合深度学习,以数据驱动的方式提供了手工算法的替代方案。今天笔者为大家分享一篇基于深度学习的SLAM综述,引用了256篇参考文献,总结的非常全面!
下面一起来阅读一下这项工作~
 2. 文章结构
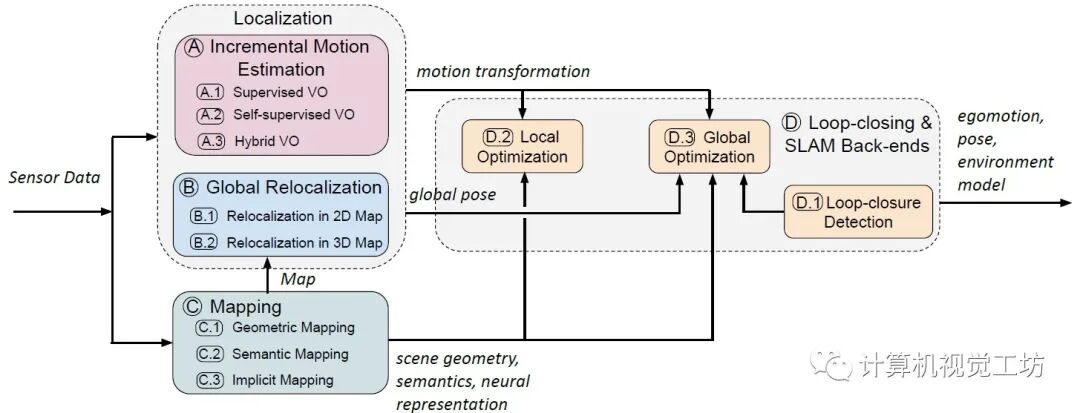
2. 文章结构这篇文章提出了使用深度学习的SLAM方法的分类法,讨论了两个基本问题:深度学习是否有望用于定位和建图、应该如何应用深度学习来解决这个问题。包括基于学习的视觉里程计、全局重定位、地图创建以及SLAM几大主题。
基于深度学习的SLAM分类,每个单独的模块可以集成到一个完整的基于深度学习的SLAM系统中。在发愁创新点的同学可以逐一参考。这里也推荐工坊推出的新课程《深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战》。
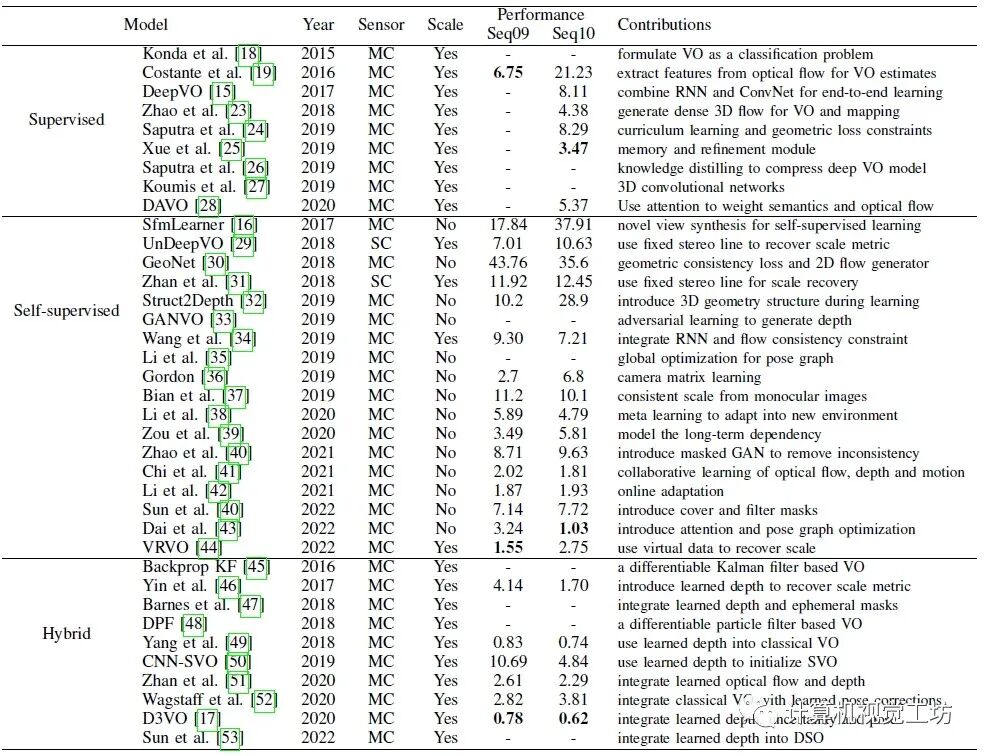
基于深度学习的视觉里程计(增量运动估计)方法列举:
基于深度学习的2D地图重定位方法总结:
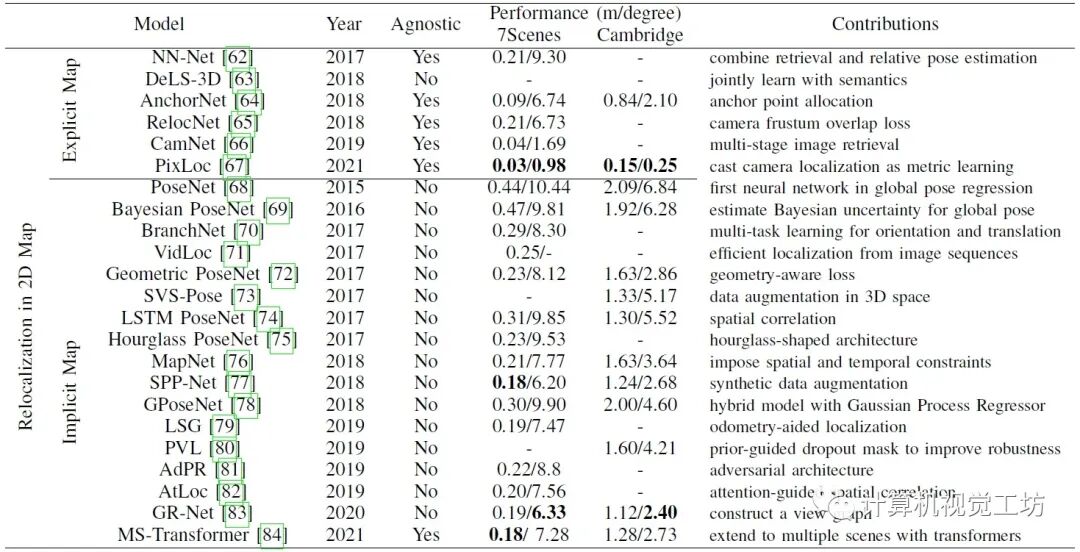
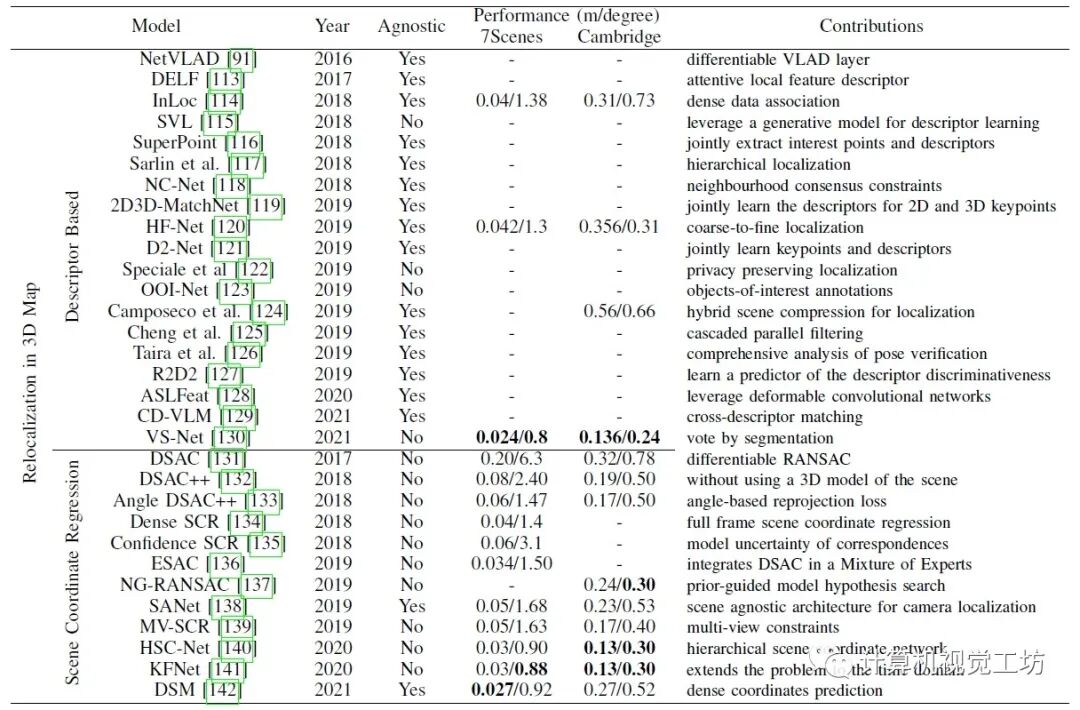
基于深度学习的三维地图重定位方法总结:
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
下载
在公众号「计算机视觉工坊」后台,回复「3dcv」,即可获取工业3D视觉、SLAM、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文;巴塞罗那自治大学和慕尼黑工业大学3D视觉和视觉导航精品课件;相机标定、结构光、三维重建、SLAM,深度估计、模型部署、3D目标检测等学习资料。
3D视觉方向交流群成立啦
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
[SLAM]视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。
 添加小助理微信:dddvisiona,加群+方向+学校|公司,拉你入群
添加小助理微信:dddvisiona,加群+方向+学校|公司,拉你入群